সার্ভো মোটরগুলি স্বয়ংসম্পূর্ণ যান্ত্রিক ডিভাইস যা দুর্দান্ত নির্ভুলতার সাথে মেশিনগুলিকে নিয়ন্ত্রণ করতে ব্যবহৃত হয়। এগুলি খেলনা থেকে শিল্প অটোমেশন পর্যন্ত অনেক অ্যাপ্লিকেশনগুলিতে পাওয়া যায়। বিভিন্ন ধরণের মোটর রয়েছে, তবে সার্ভো মোটরগুলি বিশেষত মেশিনগুলিকে নিয়ন্ত্রণ করার জন্য নির্দিষ্ট কৌণিক অবস্থানের জন্য ডিজাইন করা হয়েছে। সাধারণত সার্ভো মোটর 0 ° থেকে 180 ° এবং 0 ° থেকে 90 ° এর মধ্যে কৌণিক গতি নিয়ন্ত্রণ করতে ব্যবহৃত হয় ° দ্য servo মোটর কাজের নীতি পিডব্লিউএম ভিত্তিক ( নাড়ি প্রস্থ মড্যুলেশন ) ডাল।

সার্ভো মোটর
8051 মাইক্রোকন্ট্রোলার সহ সার্ভো মোটর ইন্টারফেসিং
একটি সার্ভো মোটর সুনির্দিষ্ট কৌণিক চলনের জন্য সর্বাধিক ব্যবহৃত মোটর। সার্ভো মোটর ব্যবহারের সুবিধা হ'ল মোটর কৌণিক অবস্থানটি কোনও প্রতিক্রিয়া প্রক্রিয়া ছাড়াই নিয়ন্ত্রণ করা যায়। সার্ভো মোটরগুলি সাধারণত ব্যবহৃত হয় বাণিজ্যিক এবং শিল্প অ্যাপ্লিকেশন । এগুলি ড্রাইভ সিস্টেমে যেমন রোবট, বিমানগুলি ইত্যাদিতেও বহুল ব্যবহৃত হয়

8051 মাইক্রোকন্ট্রোলার সহ ইন্টারফেসিং সার্ভো মোটর
শখ সার্ভো মোটর কাজের নীতি এবং অপারেশনটি খুব সহজ, এতে তিনটি তার রয়েছে যেখানে তাদের দুটি (কালো এবং লাল) বিদ্যুৎ সরবরাহ করতে ব্যবহৃত হয়েছিল এবং তৃতীয় তারটি নিয়ন্ত্রণ সংকেত সরবরাহ করতে ব্যবহৃত হয়েছিল। পালস প্রস্থ মোডুলেটেড (পিডাব্লুএম) তরঙ্গগুলি নিয়ন্ত্রণ সংকেত হিসাবে ব্যবহৃত হয় এবং কৌণিক অবস্থানটি নিয়ন্ত্রণ ইনপুটটিতে ডালের প্রস্থ দ্বারা সুনির্দিষ্ট হয়। এই নিবন্ধে, আমরা 0-180 from থেকে আবর্তনের কোণযুক্ত একটি সার্ভো মোটর ব্যবহার করছি এবং কৌণিক অবস্থানটি 1 মিমি থেকে 2 এমএসের মধ্যে ডিউটি চক্রকে পৃথক করে নিয়ন্ত্রণ করা যায়।
এখানে সার্ভো মোটর ইন্টারফেস করছে 8051 মাইক্রোকন্ট্রোলার , গ্রাউন্ড পিনের সাথে সংযুক্ত কালো তারের এবং মোটর লাল তারের থেকে পাওয়ার পায়। 8051 মাইক্রোকন্ট্রোলারের সংযুক্ত পোর্ট0 servo মোটর নিয়ন্ত্রণ। 11.0592MHz স্ফটিক দোলকটি মাইক্রোকন্ট্রোলারকে স্পন্দিত ঘড়ি সরবরাহ করার জন্য এবং স্ফটিকের ক্রিয়াকলাপ স্থিতিশীল করতে 22pf সিরামিক ক্যাপাসিটারগুলি সরবরাহ করতে ব্যবহৃত হয়। 10KΩ এবং 10uf ক্যাপাসিটারটি মাইক্রোকন্ট্রোলারকে রিসেট করার শক্তি সরবরাহ করতে ব্যবহৃত হয়।
অ্যাঙ্গেল আবর্তনের সাহায্যে সার্ভো মোটর নিয়ন্ত্রণ করা
সার্ভো মোটর ওয়ার্কিং নীতি মূলত দায়িত্ব চক্রের উপর নির্ভর করে। এটি নিয়ন্ত্রণ সংকেত হিসাবে পালস প্রস্থ মোডুলেটেড (PWM) তরঙ্গ ব্যবহার করে। ঘোরার কোণটি নিয়ন্ত্রণ পিনের নাড়ি প্রস্থের দ্বারা স্থির হয়। এখানে সার্ভো মোটর 0 থেকে 180 ডিগ্রি পর্যন্ত ঘোরার কোণে ব্যবহৃত হয়। আমরা 1 মিমি থেকে 2 এমএসের মধ্যে ডালকে আলাদা করে সঠিক কৌণিক অবস্থান নিয়ন্ত্রণ করতে পারি control

অ্যাঙ্গেল রোটেশন সহ একটি সার্ভো মোটর নিয়ন্ত্রণ করা
কৌনিক ঘূর্ণন সহ সার্ভো মোটর প্রোগ্রামিং
# অন্তর্ভুক্ত
স্কিট সার্ভোমোটর_পিন = পি0 ^ 5
অকার্যকর বিলম্ব (স্বাক্ষরযুক্ত স্বাক্ষর)
অকার্যকর servo_delay (স্বাক্ষরযুক্ত স্বাক্ষরিত)
অকার্যকর প্রধান ()
{
সার্ভোমোটর_পিন = 0x00
কর
{
// 0 turn এ ঘুরুন °
সার্ভোমোটর_পিন = 0x01
Sevo_delay (50)
সার্ভোমোটর_পিন = 0x00
বিলম্ব (1000)
// 90 ডিগ্রি চালু করুন
সার্ভোমোটর_পিন = 0x01
Sevo_delay (82)
সার্ভোমোটর_পিন = 0x00
বিলম্ব (1000)
// 180 ডিগ্রীতে ঘুরুন
সার্ভোমোটর_পিন = 0x01
Sevo_delay (110)
সার্ভোমোটর_পিন = 0x00
বিলম্ব (1000)
(1)
}
}
অকার্যকর বিলম্ব
{
স্বাক্ষরবিহীন ইন পি
(পি = 0 পি। এর জন্য)
}
অকার্যকর servo_delay (স্বাক্ষরযুক্ত স্বাক্ষরিত একটি)
{
স্বাক্ষরবিহীন ইন পি
(পি = 0 পি। এর জন্য)
}
সার্ভো মোটর ওয়ার্কিং নীতি
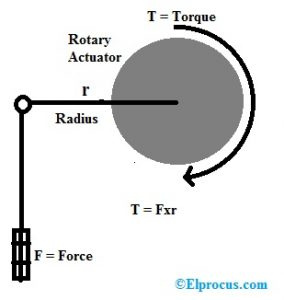
সার্ভো মোটর কাজের নীতিটি মূলত ‘ফ্লেমিং বাম হাতের নিয়মের’ উপর নির্ভর করে। মূলত servo মোটর সাথে অভিযোজিত হয় ডিসি মোটর , একটি অবস্থান সেন্সর, একটি গিয়ার হ্রাস এবং একটি বৈদ্যুতিন সার্কিট। ডিসি মোটরগুলি একটি ব্যাটারি থেকে চালিত অর্জন করে এবং উচ্চ গতি এবং কম টর্ককে চালায়। আমরা ডিসি মোটরগুলির সাথে সংযুক্ত শ্যাফ্ট এবং গিয়ারটি একত্রিত করি তারপরে আমরা মোটর গতিটি ধীরে ধীরে বৃদ্ধি করতে এবং হ্রাস করতে পারি।
পজিশন সেন্সরটি তার স্থির অবস্থান থেকে শ্যাফটের অবস্থানটি অনুভূত করে এবং নিয়ন্ত্রণ সার্কিটের কাছে তথ্য প্রেরণ করে। কন্ট্রোল সার্কিট পজিশন সেন্সর থেকে সংকেতগুলি ডিকোড করে এবং মোটরগুলির প্রকৃত অবস্থানকে পছন্দের পজিশনের সাথে তুলনা করে এবং ততক্ষণে প্রয়োজনীয় অবস্থানটি পাওয়ার জন্য ডিসি মোটরের আবর্তনের দিক নিয়ন্ত্রণ করে। সাধারণত সার্ভো মোটরের জন্য 4.8V থেকে 6 ভি ডিসি সরবরাহ প্রয়োজন।
সিরিয়াল পোর্ট কমান্ড দ্বারা সার্ভো মোটর নিয়ন্ত্রণ করা
এই প্রকল্পের মূল উদ্দেশ্যটি ব্যক্তিগত কম্পিউটার ব্যবহার করে সার্ভো মোটর নিয়ন্ত্রণ করা। সার্কিটে কমান্ড প্রেরণের জন্য ব্যক্তিগত কম্পিউটার সিরিয়াল বন্দর থেকে মাইক্রোকন্ট্রোলার এবং সিরিয়াল ইনপুট লাইন থেকে একটি একক নিয়ন্ত্রণ লাইন প্রয়োজন। সময় উত্স স্ফটিক দোলক দ্বারা সরবরাহ করা হয়। সিরিয়াল কেবল এবং লেভেল শিফ্টারের সাহায্যে কম্পিউটারে ডিজাইন করা সার্ভো মোটর সার্কিট ইন্টারফেস করা হয়েছে তারপরে কম্পিউটারের কমপ্যাক্টটি নির্বাচন করতে পিসিতে ‘হাইপার টার্মিনাল’ সফটওয়্যারটি খুলুন।

সিরিয়াল পোর্ট কমান্ড দ্বারা সার্ভো মোটর নিয়ন্ত্রণ করা
একবার কমান্ডগুলি ব্যক্তিগত কম্পিউটার (পিসি) থেকে হাইপার টার্মিনালের মাধ্যমে স্তরের শিফটারের মাধ্যমে মাইক্রোকন্ট্রোলারের কাছে প্রেরণ করা হলে, মাইক্রোকন্ট্রোলার এই ডেটাটি অর্জন করে এবং পূর্বনির্ধারিত ডেটার সাথে তাদের তুলনা করে এবং মোটর চালককে এটি চালনা করতে সক্রিয় করতে সংশ্লিষ্ট সংকেত উত্পন্ন করে কাঙ্ক্ষিত গতি। অনেক মাইক্রোকন্ট্রোলার প্রকল্পসমূহ সার্ভো মোটরের উপর ভিত্তি করে বিকাশ করা যেমন ব্যালেন্সিং রোবট, রানওয়ে হেলিকপ্টার এবং আরও অনেক কিছু। 360 ডিগ্রি ক্যামেরা নিয়ন্ত্রণ করা সম্ভব হওয়ায় আমরা ওয়্যারলেস ক্যামেরার সাথে ইন্টারফেস করে সুরক্ষার উদ্দেশ্যে সার্ভো মোটর ব্যবহার করতে পারি।
সেলফ ব্যালেন্সিং রোবট
স্ব-ব্যালেন্সিং রোবটটি সার্ভো মোটরগুলির সাহায্যে নিজেকে ভারসাম্য বজায় রাখতে সক্ষম। এই রোবটটি কাঠামোগত, যান্ত্রিক এবং বৈদ্যুতিন উপাদানগুলির সাথে একত্রিত হয়ে দৃশ্যমান ভারসাম্যহীন প্ল্যাটফর্ম তৈরি করে যা এক প্রান্তরেখাতে টিপিংয়ের জন্য অত্যন্ত নিষ্পত্তি হয়। রোবটের চাকা দুটি উপায়ে স্বাধীন ঘূর্ণায়মান সক্ষম, যা একটি সার্ভো মোটর দ্বারা চালিত। মাটির সাথে সম্পর্কিত ডিভাইসের কোণ সম্পর্কে তথ্য পাওয়া যাবে কাত সেন্সর ডিভাইসে

সেলফ ব্যালেন্সিং রোবট
টিল্ট সেন্সরটি একটি অ্যাক্সিলোমিটার, জাইরোস্কোপিক সেন্সর বা হতে পারে আইআর সেন্সর (মাটিতে দূরত্ব পরিমাপ)। সেন্সরগুলি নিয়ন্ত্রণ ইউনিটে তথ্য প্রেরণ করে, যা ডিভাইসটির ভারসাম্য বজায় রাখতে সার্ভো মোটরগুলিতে ক্ষতিপূরণ পজিশন নিয়ন্ত্রণ সংকেত তৈরি করতে একটি মৌলিক আনুপাতিক, ইন্টিগ্রাল, ডেরিভেটিভ (পিআইডি) অ্যালগরিদম ব্যবহার করে প্রতিক্রিয়া প্রক্রিয়াকরণ করবে।
সার্ভো মোটর অ্যাপ্লিকেশন
- এটি মেশিনে টুকরো টুকরো টুকরো করার জন্য প্রেস মেশিনে ব্যবহৃত হয়
- এটি চিনি ফিলিং স্টেশনে ব্যবহৃত হয়
- এটি লেবেল অ্যাপ্লিকেশনগুলিতে ব্যবহৃত হয়
- এটি র্যান্ডম টাইমিং ফাংশন সহ প্যাকিং সিস্টেম ব্যবহৃত হয়
- এটি বিমানে ব্যবহৃত হয়
সার্ভো মোটরের সুবিধা
- কোনও মোটর যদি ভারী বোঝা পেয়ে যায় তবে মোটরটি ঘোরানোর চেষ্টা হিসাবে চালক মোটর কয়েলে কারেন্টটি বাড়িয়ে তুলবে। মূলত, কোনও পদক্ষেপের বাইরে অবস্থা নেই।
- সার্ভো মোটর দ্বারা উচ্চ গতির অপারেশন সম্ভব।
এটি সারো মোটর কাজের নীতি সম্পর্কে এবং about 8051 মাইক্রোকন্ট্রোলারের সাথে ইন্টারফেসিং .এছাড়াও, এই নিবন্ধ সম্পর্কিত কোনও প্রযুক্তিগত সহায়তার জন্য বা ইলেকট্রনিক্স প্রকল্প যেগুলি আরটিসি, ওএলইডি, ফ্ল্যাশ মেমরি, কাস্টমাইজড এলসিডি, টাচ স্ক্রিন প্রদর্শন এবং ইত্যাদির মতো ইন্টারফেসিং ডিভাইসগুলি ব্যবহার করে ডিজাইন করা হয়েছে আপনি নীচের মন্তব্য বিভাগে আপনার মন্তব্য দিয়ে আমাদের কাছে যেতে পারেন।