এই পোস্টে আমরা একটি সাধারণ 3 ফেজ ইন্ডাকশন মোটর স্পিড কন্ট্রোলার সার্কিট তৈরি নিয়ে আলোচনা করব যা একক ফেজ ইন্ডাকশন মোটরের জন্য বা আক্ষরিক অর্থে যে কোনও ধরণের এসি মোটরের জন্য প্রয়োগ করা যেতে পারে।
যখন এটি আসে আনয়ন মোটর গতি নিয়ন্ত্রণ সাধারণত ম্যাট্রিক্স রূপান্তরকারী নিয়োগ করা হয়, অনেক জটিল পর্যায়ে যেমন এলসি ফিল্টার, দ্বি-নির্দেশমূলক অ্যারে (আইজিবিটি ব্যবহার করে) ইত্যাদি জড়িত etc.
এগুলি সবশেষে একটি কাটা এসি সিগন্যাল অর্জনের জন্য নিযুক্ত করা হয় যার ডিউটি চক্রটি একটি জটিল মাইক্রোকন্ট্রোলার সার্কিট ব্যবহার করে সামঞ্জস্য করা যেতে পারে, শেষ পর্যন্ত প্রয়োজনীয় মোটর গতির নিয়ন্ত্রণ সরবরাহ করে।
তবে আমরা পরীক্ষামূলকভাবে উন্নত শূন্য ক্রসিং ডিটেক্টর অপটো কাপলার আইসি, একটি পাওয়ার ট্রাইস এবং একটি পিডাব্লুএম সার্কিট ব্যবহার করে একটি আরও 3 টি পর্যায়ে ইন্ডাকশন মোটর স্পিড নিয়ন্ত্রণ অর্জনের চেষ্টা করতে পারি।
জিরো ক্রসিং ডিটেক্টর অপ্টো কাপলারের ব্যবহার
Optocouplers এর এমওসি সিরিজের জন্য ধন্যবাদ যা ট্রায়াক কন্ট্রোল সার্কিটকে অত্যন্ত সুরক্ষিত এবং কনফিগার করা সহজ করেছে এবং উদ্দেশ্যযুক্ত নিয়ন্ত্রণগুলির জন্য কোনও ঝামেলা মুক্ত PWM সংহতকরণের অনুমতি দেয়।
আমার আগের একটি পোস্টে আমি একটি সাধারণ আলোচনা করেছি পিডব্লিউএম সফট স্টার্ট মোটর কন্ট্রোলার সার্কিট যা সংযুক্ত মোটরে কার্যকর সফট স্টার্ট সরবরাহের জন্য MOC3063 আইসি কার্যকর করেছে।
এখানেও আমরা প্রস্তাবিত 3 ফেজ ইন্ডাকশন মোটর স্পিড কন্ট্রোলার সার্কিট প্রয়োগের জন্য অভিন্ন পদ্ধতি ব্যবহার করি, নিম্নলিখিত চিত্রটি কীভাবে এটি করা যায় তা দেখায়:
চিত্রটিতে আমরা দেখতে পাচ্ছি যে তিনটি অভিন্ন এমওসি ওপ্টো কাপলারের পর্যায়গুলি তাদের মানক ট্রায়াক নিয়ন্ত্রক মোডে কনফিগার করা হয়েছে এবং ইনপুট পাশটি একটিতে সংহত হয়েছে সরল আইসি 555 পিডাব্লুএম সার্কিট ।
3 এমওসি সার্কিট 3 ফেজ এসি ইনপুট পরিচালনা করতে এবং সংযুক্ত আনয়ন মোটরটিতে একই সরবরাহের জন্য কনফিগার করা হয়েছে।
অপটোর বিচ্ছিন্ন এলইডি কন্ট্রোল পাশের পিডাব্লুএম ইনপুটটি এমওসি আইসিএস দ্বারা প্রক্রিয়াধীন 3 ফেজ এসি ইনপুটটির কাটা অনুপাত নির্ধারণ করে।
আইসি 555 পিডব্লিউএম নিয়ামক ব্যবহার করে (জিরো ভোল্টেজ স্যুইচিং)
এটি সামঞ্জস্য করে বোঝায় 555 আইসি যুক্ত PWM পাত্র এক কার্যকরভাবে আনয়ন মোটরের গতি নিয়ন্ত্রণ করতে পারে।
এর পিন # 3 এ আউটপুটটি একটি ভিন্ন শুল্ক চক্র নিয়ে আসে যা ফলস্বরূপ আউটপুট ট্রায়াকগুলি স্যুইচ করে, ফলস্বরূপ এসি আরএমএস মান বৃদ্ধি করে বা হ্রাস করে।
বিস্তৃত পিডাব্লুএমএম এর মাধ্যমে আরএমএস বাড়ানো মোটরটিতে একটি উচ্চ গতি অর্জন করতে সক্ষম করে, সংকীর্ণ পিডাব্লুএমএসের মাধ্যমে এসি আরএমএস হ্রাস করার ফলে একটি বিপরীত প্রভাব ঘটে, এ কারণেই মোটরটি আনুপাতিকভাবে ধীর হয়ে যায়।
উপরের বৈশিষ্ট্যগুলি অনেক নির্ভুলতা এবং সুরক্ষার সাথে বাস্তবায়িত করা হয়েছে, যেহেতু আইসিগুলিকে অনেকগুলি অভ্যন্তরীণ পরিশীলিত বৈশিষ্ট্য দেওয়া হয়েছে, বিশেষভাবে উদ্দেশ্যে ড্রাইভিং ট্রায়াকস এবং ভারী প্ররোচক লোড s যেমন ইন্ডাকশন মোটর, সোলেনয়েডস, ভালভ, কন্টাক্টর, সলিড স্টেট রিলে ইত্যাদি
আইসি এছাড়াও ডিসি পর্যায়ের জন্য পুরোপুরি বিচ্ছিন্ন অপারেশন নিশ্চিত করে যা ব্যবহারকারীকে বৈদ্যুতিক শকের ভয় ছাড়াই সামঞ্জস্য করতে সক্ষম করে।
নীতিটি দক্ষতার সাথে 3 এর পরিবর্তে একক এমওসি আইসি নিয়োগের মাধ্যমে একক পর্বের মোটর গতি নিয়ন্ত্রণের জন্যও ব্যবহার করা যেতে পারে।
নকশা আসলে উপর ভিত্তি করে সময় আনুপাতিক ট্রায়াক ড্রাইভ তত্ত্ব। উপরের আইসি 555 পিডাব্লুএম সার্কিটকে অনেক বেশি ফ্রিকোয়েন্সিতে 50% শুল্ক চক্র উত্পাদন করতে সামঞ্জস্য করা যেতে পারে, যখন নীচের পিডাব্লুএম সার্কিটটি যুক্ত পাত্রের সামঞ্জস্যের মাধ্যমে আবেশন মোটরের গতি নিয়ন্ত্রণ কার্যক্রম পরিচালনা করতে ব্যবহার করা যেতে পারে।
এই 555 আইসি উপরের আইসি 555 সার্কিটের তুলনায় তুলনামূলকভাবে কম ফ্রিকোয়েন্সি থাকার প্রস্তাব দেওয়া হয়। এটি পিন # 6/2 ক্যাপাসিটরটিকে প্রায় 100nF এ বাড়িয়ে করা যেতে পারে।

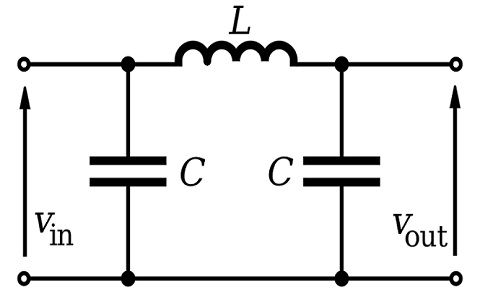
দ্রষ্টব্য: ফিজি ওয়্যারগুলির সাথে সিরিয়গুলিতে যথাযথ সূচকগুলি যুক্ত করা সিস্টেমের গতিময় নিয়ন্ত্রণ নিয়ন্ত্রণ কার্যকারিতাটি কঠোরভাবে সংশোধন করতে পারে।
উপরোক্ত ধারণাটি ব্যবহার করে ধরে নেওয়া ওয়েভফর্ম এবং ফেজ নিয়ন্ত্রণ:

3-ফেজ ইন্ডাকশন মোটর নিয়ন্ত্রণ করার উপরোক্ত বর্ণিত পদ্ধতিটি আসলে এটি বেশ অশোধিত is কোনও ভি / হার্জ নিয়ন্ত্রণ নেই ।
মোটরটিতে একটি গড় শক্তি উত্পাদন করতে এবং মোট গড় এসিটিকে মোটরটিতে পরিবর্তন করে গতি নিয়ন্ত্রণ করতে এটি কেবল ভিন্ন হারে মেইনগুলি অন / অফে সরাতে নিয়োগ দেয়।
আপনি যদি মোটরটি 40 মিনিট বা প্রতি মিনিটে 50 বার ম্যানুয়ালি চালু / অফ করেন তবে কল্পনা করুন। এর ফলে আপনার মোটরটি কিছু আপেক্ষিক গড় মানের কাছে ধীরে ধীরে ধীরে ধীরে ধীরে ধীরে ধীরে চলবে moving উপরোক্ত নীতিটি একইভাবে কাজ করে।
আরও প্রযুক্তিগত পন্থা হ'ল এমন একটি সার্কিট ডিজাইন করা যা ভি / এইচজেড অনুপাতের যথাযথ নিয়ন্ত্রণ নিশ্চিত করে এবং স্লিপ বা কোনও ভোল্টেজের ওঠানামার গতির উপর নির্ভর করে স্বয়ংক্রিয়ভাবে একই সামঞ্জস্য করে।
এর জন্য আমরা মূলত নিম্নলিখিত পদক্ষেপগুলি নিয়োগ করি:
- এইচ-ব্রিজ বা ফুল সেতু আইজিবিটি ড্রাইভার সার্কিট
- পূর্ণ সেতু সার্কিট খাওয়ানোর জন্য 3-ফেজ জেনারেটর পর্যায়
- ভি / হার্জেড পিডাব্লুএম প্রসেসর
পূর্ণ সেতু আইজিবিটি নিয়ন্ত্রণ সার্কিট ব্যবহার করা
যদি উপরের ট্রাইাক ভিত্তিক ডিজাইনের সেট আপ করার পদ্ধতিগুলি আপনার কাছে ভয়ঙ্কর মনে হয়, তবে নীচের পূর্ণ ব্রীজ পিডব্লিউএম ভিত্তিক আনয়ন মোটর গতির নিয়ন্ত্রণ চেষ্টা করা যেতে পারে:

উপরের চিত্রটিতে প্রদর্শিত সার্কিটটি একটি একক চিপ পূর্ণ-সেতু চালক ব্যবহার করে আইসি আইআরএস 2330 (সর্বশেষ সংস্করণটি 6EDL04I06NT) যা নিরাপদ এবং একটি নিখুঁত 3 ধাপের মোটর অপারেশন সন্তুষ্ট করতে অন্তর্নির্মিত সমস্ত বৈশিষ্ট্য রয়েছে।
আইসিটির কেবল তার প্রয়োজনীয় এইচআইএন / লিন পিনআউটগুলি জুড়ে একটি সিঙ্ক্রোনাইজড 3 ফেজ লজিক ইনপুট প্রয়োজন 3 ফেজ অসিলেটিং আউটপুট উত্পন্ন করার জন্য যা শেষ পর্যন্ত সম্পূর্ণ ব্রিজ আইজিবিটি নেটওয়ার্ক এবং সংযুক্ত 3 ফেজ মোটরের অপারেটিংয়ের জন্য ব্যবহৃত হয়।
দ্য গতি নিয়ন্ত্রণ পিডব্লিউএম ইনজেকশন আমাদের পূর্ববর্তী ডিজাইনগুলিতে দেখা যায়, আইসি 555 পিডব্লিউএম জেনারেটরের এসপিডাব্লু ফিড দিয়ে নিয়ন্ত্রিত 3 টি পৃথক অর্ধ সেতু এনপিএন / পিএনপি ড্রাইভার পর্যায়ে প্রয়োগ করা হয়। এই পিডব্লিউএম স্তরটি শেষ পর্যন্ত ইন্ডাকশন মোটরের গতি নিয়ন্ত্রণ করার জন্য ব্যবহৃত হতে পারে।
আনয়ন মোটরের আসল গতি নিয়ন্ত্রণের পদ্ধতিটি শিখার আগে প্রথমে কীভাবে স্বয়ংক্রিয় তা বুঝতে পারি ভি / হার্জ নিয়ন্ত্রণ নীচে আলোচিত হিসাবে কয়েকটি আইসি 555 সার্কিট ব্যবহার করে অর্জন করা যেতে পারে
স্বয়ংক্রিয় ভি / এইচজেড পিডাব্লুএম প্রসেসর সার্কিট (বন্ধ লুপ)
উপরের বিভাগগুলিতে আমরা ডিজাইনগুলি শিখেছি যা নির্ধারণকারীর দ্বারা নির্ধারিত হারে আবেশন মোটরকে চলতে সহায়তা করবে, তবে নীচের পিডব্লিউএম প্রসেসরের এইচয়ের সাথে সংহত না করা হলে এটি ধ্রুবক ভি / এইচজেডের অনুপাত অনুযায়ী সামঞ্জস্য করবে না ব্রিজ পিডাব্লুএম ইনপুট ফিড।

উপরের সার্কিটটি একটি সাধারণ PWM জেনারেটরটি বেশ কয়েকটি আইসি 555 ব্যবহার করে । আইসি 1 পিডাব্লুএম ফ্রিকোয়েন্সি উত্পন্ন করে যা আই 2 2 এর পিন # 6 এ আর 4 / সি 3 এর সাহায্যে ত্রিভুজ তরঙ্গগুলিতে রূপান্তরিত হয়েছে।
এই ত্রিভুজ তরঙ্গগুলিকে আইসি 2 এর পিন # 5 এ সাইনওয়েভ রিপলের সাথে তুলনা করা হচ্ছে। এই নমুনা রিপলগুলি 3 টি ফেজ এসি মেইনগুলিকে 12 ভি এসি রিপলে সংশোধন করে অর্জিত হয় এবং প্রয়োজনীয় প্রসেসিংয়ের জন্য আইসি 2 এর # 5 পিন করতে খাওয়ানো হয়।
দুটি তরঙ্গরূপের তুলনা করে, একটি যথাযথ মাত্রাযুক্ত এসপিডাব্লুএম উত্পাদিত হয় আইসি 2 এর পিন # 3 এ, যা এইচ-ব্রিজ নেটওয়ার্কের জন্য ড্রাইভিং পিডাব্লুএম হয়।
ভি / এইচজেড সার্কিট কীভাবে কাজ করে
পিন # 5 এ ক্যাপাসিটারটিতে পাওয়ার যখন স্যুইচ করা হয় তখন পিন # 5 এ শূন্য ভোল্টেজ রেন্ডার করে শুরু হয় যা সর্বনিম্ন এসপিডব্লিউ মানের কারণ হয় এইচ ব্রিজ সার্কিট , যার ফলে আবর্তন মোটরকে ধীরে ধীরে ধীরে ধীরে নরম শুরু করতে সক্ষম করে।
এই ক্যাপাসিটারটি চার্জ করার সাথে সাথে পিন # 5 এর সম্ভাবনা বৃদ্ধি পায় যা আনুপাতিকভাবে এসপিডাব্লুএম উত্থাপন করে এবং মোটরটিকে ধীরে ধীরে গতি অর্জনে সক্ষম করে।
আমরা টেচোমিটার প্রতিক্রিয়া সার্কিটটি দেখতে পারি যা আইসি 2 এর পিন # 5 এর সাথেও সংহত রয়েছে।
এই টেকোমিটার রটার গতি বা স্লিপের গতি পর্যবেক্ষণ করে এবং আইসি 2 এর পিন # 5 এ অতিরিক্ত ভোল্টেজ উত্পন্ন করে।
এখন মোটরের গতি বাড়ার সাথে সাথে স্লিপের গতি স্ট্যাটার ফ্রিকোয়েন্সিটির সাথে সিঙ্ক্রোনাইজ করার চেষ্টা করে এবং প্রক্রিয়াতে এটি গতি অর্জন শুরু করে।
আনয়ন স্লিপে এই বৃদ্ধি টেচোমিটার ভোল্টেজকে আনুপাতিকভাবে বাড়িয়ে তোলে যার ফলে আইসি 2 এর বৃদ্ধি ঘটায় SPWM আউটপুট এবং এর ফলে আরও মোটর গতি বৃদ্ধি পায়।
উপরের সামঞ্জস্যটি ভি / হার্জ হার অনুপাতটিকে মোটামুটি ধ্রুবক স্তরে বজায় রাখার চেষ্টা করে অবশেষে যতক্ষণ না আইসি 2 থেকে এসপিডাব্লুএম আর কোনও বৃদ্ধি করতে অক্ষম হয়।
এই সময়ে স্লিপ গতি এবং স্টেটরের গতি একটি স্থিতিশীল অবস্থা অর্জন করে এবং ইনপুট ভোল্টেজ বা স্লিপের গতি (লোডের কারণে) পরিবর্তিত না হওয়া অবধি এটি বজায় রাখা হয়। এগুলি পরিবর্তিত হলে ভি / এইচজেডজ প্রসেসর সার্কিট আবার কার্যত আসে এবং আনয়ন মোটরের গতির অনুকূল প্রতিক্রিয়া বজায় রাখার জন্য অনুপাতটি সামঞ্জস্য করতে শুরু করে।
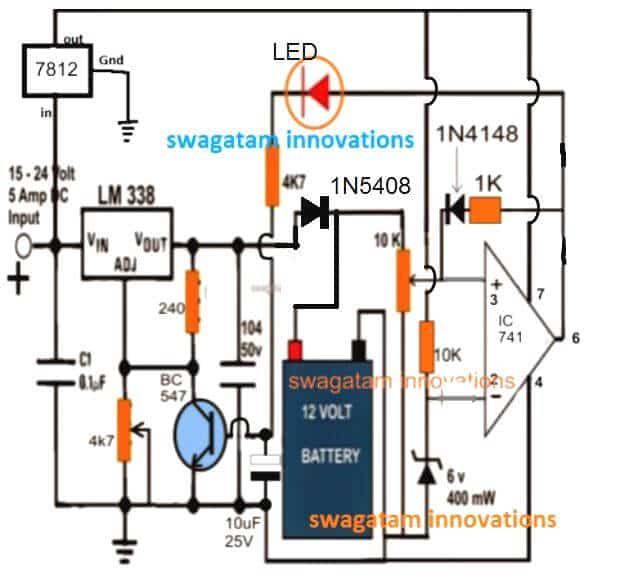
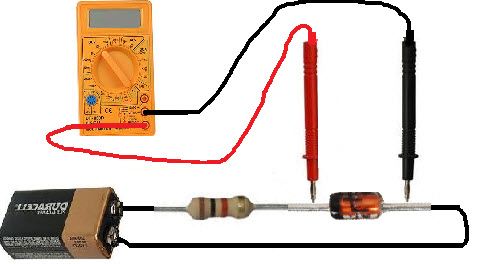
টেচোমিটার
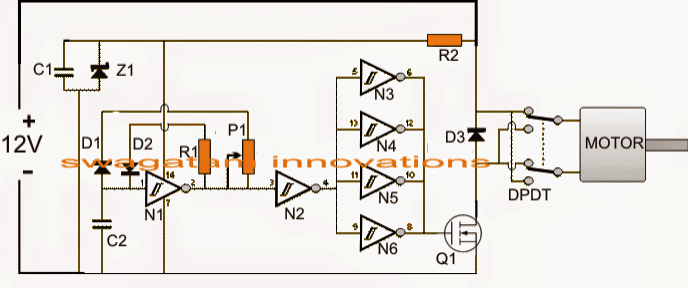
দ্য টাকোমিটার সার্কিট নিম্নলিখিত সহজ সার্কিটটি ব্যবহার করে সস্তাভাবে তৈরি করা যেতে পারে এবং উপরের বর্ণিত সার্কিট স্টেজগুলির সাথে একত্রিত করা যেতে পারে:

গতি নিয়ন্ত্রণ কীভাবে প্রয়োগ করবেন Imp
উপরের অনুচ্ছেদে আমরা স্বয়ংক্রিয় নিয়ন্ত্রণ প্রক্রিয়া বুঝতে পেরেছিলাম যা একটিকে সংহত করে অর্জিত হতে পারে টেচোমিটার প্রতিক্রিয়া একটি স্বয়ংক্রিয় নিয়ন্ত্রণকারী SPWM কন্ট্রোলার সার্কিটে।
এখন আসুন শিখুন কীভাবে আনয়ন মোটরের গতি ফ্রিকোয়েন্সি পরিবর্তনের মাধ্যমে নিয়ন্ত্রণ করা যায়, যা শেষ পর্যন্ত এসপিডাব্লুএমকে সঠিক ভি / হার্জ অনুপাতটি ড্রপ এবং বজায় রাখতে বাধ্য করে।
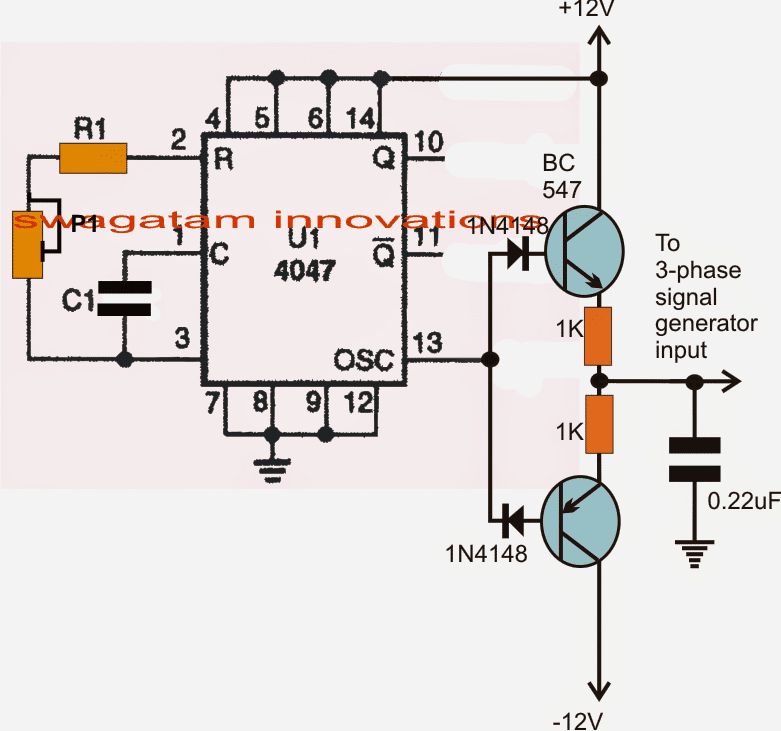
নিম্নলিখিত চিত্রটি গতি নিয়ন্ত্রণের পর্যায়ে ব্যাখ্যা করেছে:

এখানে আমরা আইসি 4035 ব্যবহার করে একটি 3-ফেজ জেনারেটর সার্কিট দেখতে পাচ্ছি যার পিন # 6 এ ঘড়ির ইনপুটটি পরিবর্তিত করে ফেজ শিফট ফ্রিকোয়েন্সি পরিবর্তিত হতে পারে।
পূর্ণ-ব্রিজ ড্রাইভার ড্রাইভারের জন্য প্রয়োজনীয় এইচআইএন, লিন ফিড উত্পাদনের জন্য 4049 আইসি গেটগুলি জুড়ে 3 ফেজ সংকেত প্রয়োগ করা হয়।
এর দ্বারা বোঝা যায় যে আইসি 4035 এর ঘড়ির ফ্রিকোয়েন্সি যথাযথভাবে পরিবর্তিত করে আমরা কার্যকরভাবে আনয়ন মোটরের অপারেটিং 3-ফেজ ফ্রিকোয়েন্সিটি পরিবর্তন করতে পারি।
এটি একটি সাধারণ আইসি 555 আশ্চর্যজনক সার্কিটের মাধ্যমে প্রয়োগ করা হয় যা আইসি 4035 এর পিন # 6 এ সামঞ্জস্যযোগ্য ফ্রিকোয়েন্সি ফিড করে এবং সংযুক্ত 100 কে পাত্রের মাধ্যমে ফ্রিকোয়েন্সিটি সামঞ্জস্য করতে দেয়। ক্যাপাসিটার সি এমন গণনা করা দরকার যে সংযোজিত ফ্রিকোয়েন্সি রেঞ্জটি সংযুক্ত আবেশন মোটরের সঠিক স্পেসিফিকেশনের মধ্যে আসে।
যখন ফ্রিকোয়েন্সি পাত্রটি বৈচিত্রময় হয়, আনয়ন মোটরের কার্যকর ফ্রিকোয়েন্সিও পরিবর্তিত হয়, যা মোটামুটিভাবে মোটরের গতি পরিবর্তন করে।
উদাহরণস্বরূপ, যখন ফ্রিকোয়েন্সি হ্রাস হয়, মোটরের গতি হ্রাস পায়, যার ফলস্বরূপ টেচোমিটার আউটপুটটি ভোল্টেজকে আনুপাতিকভাবে হ্রাস করে।
টেচোমিটার আউটপুটে এই আনুপাতিক হ্রাস এসপিডাব্লুএমকে সংকুচিত করতে বাধ্য করে এবং এর ফলে মোটরতে ভোল্টেজ আউটপুটকে আনুপাতিকভাবে নীচে টান দেয়।
পরিবর্তে এই ক্রিয়াটি ফ্রিকোয়েন্সি নিয়ন্ত্রণের মাধ্যমে আবেশন মোটরের গতি নিয়ন্ত্রণ করার সময় ভি / হার্জ হার অনুপাত বজায় রাখার বিষয়টি নিশ্চিত করে।
সতর্কতা: উপরের ধারণাটি কেবলমাত্র তাত্ত্বিক অনুমানের উপর ডিজাইন করা হয়েছে, দয়া করে সতর্কতার সাথে এগিয়ে যান।
এই 3-ফেজ ইন্ডাকশন মোটর স্পিড কন্ট্রোলার ডিজাইন সম্পর্কে আপনার যদি আরও সন্দেহ থাকে তবে আপনার মন্তব্যের মাধ্যমে এটি পোস্ট করার জন্য আপনাকে স্বাগতম।
পূর্ববর্তী: কীভাবে একটি নিরবচ্ছিন্ন বিদ্যুৎ সরবরাহ (ইউপিএস) সার্কিট ডিজাইন করবেন পরবর্তী: আইসি 555 দিয়ে দুটি বিকল্প লোড চালু / বন্ধ করা হচ্ছে