স্পন্দন মড্যুলেশন (PM) হল এক ধরনের মড্যুলেশন যেখানে সংকেত পালস আকারে প্রেরণ করা হয়। এই ধরনের মডুলেশনে, ক্রমাগত সংকেতগুলি স্বাভাবিক বিরতিতে নমুনা করা হয়, তাই এই মডুলেশন কৌশলটি অ্যানালগ তথ্য প্রেরণ করতে ব্যবহৃত হয়। পালস মড্যুলেশন দুটি ধরণের এনালগ মড্যুলেশন এবং শ্রেণীবদ্ধ করা হয় ডিজিটাল মড্যুলেশন . এনালগ মড্যুলেশনকে তিন প্রকার PAM, PWM এবং PPM-এ শ্রেণীবদ্ধ করা হয় যেখানে ডিজিটাল মড্যুলেশনকে পালস কোড এবং ডেল্টা মড্যুলেশনে শ্রেণীবদ্ধ করা হয়। তাই এই নিবন্ধটি পালস মড্যুলেশনের ধরনগুলির একটির একটি সংক্ষিপ্ত বিবরণ নিয়ে আলোচনা করে যথা- পালস পজিশন মড্যুলেশন তত্ত্ব বা পিপিএম।
পালস পজিশন মডুলেশন কি?
পালস পজিশন মড্যুলেশন হল এক ধরনের অ্যানালগ মড্যুলেশন যা নমুনাকৃত মড্যুলেটিং সিগন্যালের প্রশস্ততার উপর ভিত্তি করে ডালের অবস্থানের মধ্যে তারতম্যের অনুমতি দেয় যাকে পিপিএম বা পালস পজিশন মডুলেশন বলা হয়। এই ধরনের মড্যুলেশনে, ডালের প্রশস্ততা এবং প্রস্থ স্থিতিশীল রাখা হয় এবং ডালের অবস্থান শুধুমাত্র বৈচিত্র্যময়।
পিপিএম কৌশলটি কম্পিউটারকে প্রতিটি ডেটা প্যাকেট কম্পিউটারে পৌঁছানোর জন্য নেওয়া সময় পরিমাপ করে ডেটা প্রেরণ করতে দেয়। তাই প্রায়শই অপটিক্যাল যোগাযোগের মধ্যে ব্যবহৃত হয় যেখানে ছোট মাল্টি-পাথওয়ে হস্তক্ষেপ রয়েছে। এই মড্যুলেশন সম্পূর্ণরূপে ডিজিটাল সংকেত প্রেরণ করে এবং এনালগ সিস্টেম দ্বারা ব্যবহার করা যাবে না। এটি সাধারণ ডেটা প্রেরণ করে যা ফাইল স্থানান্তর করার সময় দক্ষ নয়।
পিপিএম, পিডব্লিউএম এবং পিএএম-এর মধ্যে পার্থক্য সম্পর্কে আরও জানতে এখানে ক্লিক করুন
পালস পজিশন মডুলেশন ব্লক ডায়াগ্রাম
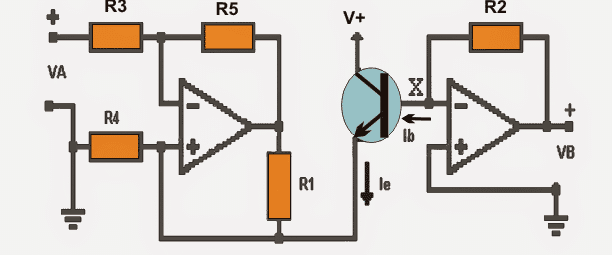
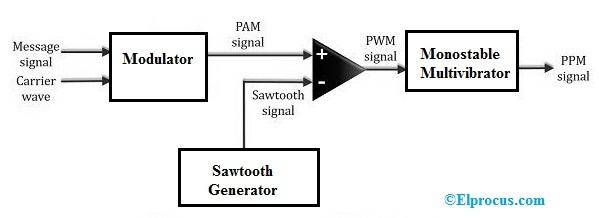
পালস পজিশন মড্যুলেশন ব্লক ডায়াগ্রাম নীচে দেখানো হয়েছে যা একটি পিপিএম সংকেত তৈরি করে। আমরা জানি যে একটি পালস পজিশন মড্যুলেশন সিগন্যাল একটি PWM সিগন্যাল ব্যবহার করে সহজেই তৈরি করা হয়। সুতরাং, এখানে তুলনাকারীর o/p এ, আমরা ধরে নিয়েছি যে একটি PWM সংকেত ইতিমধ্যেই তৈরি হয়েছে এবং এখন আমাদের একটি PPM সংকেত তৈরি করতে হবে।
উপরের ব্লক ডায়াগ্রামে, একবার মডুলেটর থেকে একটি PAM সংকেত তৈরি করা হয় এবং আরও, এটি একটি PWM সংকেত তৈরি করতে তুলনাকারীতে প্রক্রিয়া করা হয়। এর পরে, তুলনাকারীর আউটপুট একটি একচেটিয়া মাল্টিভাইব্রেটরে দেওয়া হয় যা নেতিবাচক প্রান্তটি ট্রিগার করে। এইভাবে, PWM সিগন্যালের ট্রেলিং প্রান্তের সাথে, মনোস্টেবলের আউটপুট বেশি হয়।

এইভাবে, পিপিএম সিগন্যালের একটি পালস পিডব্লিউএম সিগন্যালের পিছনের প্রান্ত দিয়ে শুরু হয়। এখানে, এটি উল্লেখ্য যে উচ্চ আউটপুট সময়কাল প্রধানত মাল্টিভাইব্রেটরের আরসি উপাদানগুলির উপর নির্ভর করে। তাই পিপিএম সিগন্যালের ক্ষেত্রে একটি স্থিতিশীল প্রস্থের স্পন্দন অর্জিত হওয়ার এটাই প্রধান কারণ।
PWM সিগন্যালের ট্রেইলিং এজ মড্যুলেটিং সিগন্যালের মাধ্যমে স্থানান্তরিত হয়, তাই এই শিফটের সাথে, PPM এর স্পন্দনগুলি তার অবস্থানের মধ্যে পরিবর্তন দেখাবে। পিপিএম সংকেতের তরঙ্গরূপ উপস্থাপনাটি নীচে দেখানো হয়েছে।
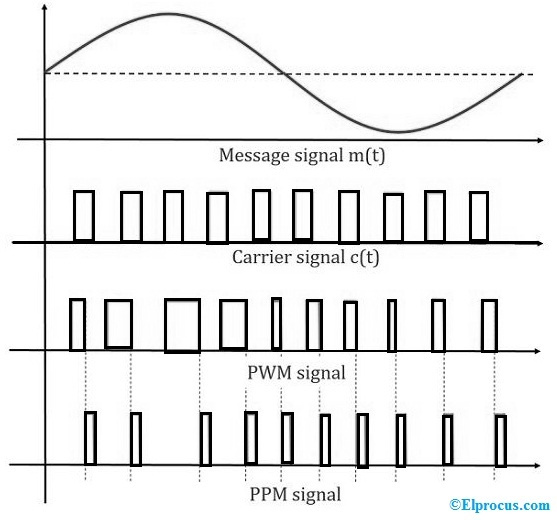
পালস পজিশন মডুলেশনের উপরের তরঙ্গরূপে, প্রথম তরঙ্গরূপটি বার্তা সংকেত, দ্বিতীয় সংকেতটি একটি ক্যারিয়ার সংকেত এবং তৃতীয় সংকেতটি PWM সংকেত। এই সংকেতটিকে পিপিএম সিগন্যাল জেনারেশনের জন্য একটি রেফারেন্স হিসাবে বিবেচনা করা হয় যেমনটি শেষ চিত্রে দেখানো হয়েছে। উপরের তরঙ্গরূপগুলিতে, আমরা লক্ষ্য করতে পারি যে PWM নাড়ির শেষ বিন্দু পাশাপাশি পিপিএম নাড়ির শুরু বিন্দু কাকতালীয়, যা বিন্দুযুক্ত রেখার সাথে দেখানো হয়েছে।
পালস অবস্থান মড্যুলেশন সনাক্তকরণ
পালস পজিশন মডুলেশন ব্লক ডায়াগ্রামের সনাক্তকরণ নীচে দেখানো হয়েছে। নিম্নলিখিত ব্লক ডায়াগ্রামে, আমরা লক্ষ্য করতে পারি যে এতে একটি পালস জেনারেটর, এসআর এফএফ, রেফারেন্স পালস জেনারেটর এবং একটি পিডব্লিউএম ডিমোডুলেটর রয়েছে।
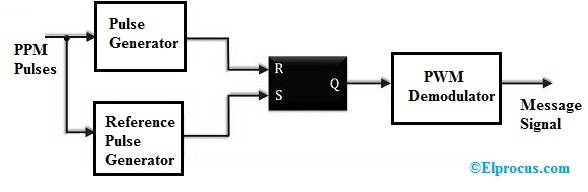
PPM সংকেত যা মডুলেশন সার্কিট থেকে প্রেরণ করা হয় তা ট্রান্সমিশন জুড়ে শব্দের সাথে বিকৃত হয়ে যাবে। তাই এই বিকৃত সংকেত পৌঁছে যাবে demodulator সার্কিটে। এই সার্কিটে ব্যবহৃত পালস জেনারেটর একটি নির্দিষ্ট সময়কালের সাথে একটি স্পন্দিত তরঙ্গরূপ তৈরি করবে। এই তরঙ্গরূপটি SR FF এর রিসেট পিনে দেওয়া হয়। রেফারেন্স পালস জেনারেটর একটি নির্দিষ্ট সময়কালের সাথে একটি রেফারেন্স পালস তৈরি করে একবার এটিতে একটি প্রেরণ করা পিপিএম সংকেত দেওয়া হয়। তাই এই রেফারেন্স পালস SR FF সেট করতে ব্যবহার করা হয়। FF এর আউটপুটে, এই সেট এবং রিসেট সংকেতগুলি একটি PWM সংকেত তৈরি করবে। আরও, এই সংকেতটি মূল বার্তা সংকেত দেওয়ার জন্য প্রক্রিয়া করা হয়।
পালস পজিশন মডুলেশন কিভাবে কাজ করে?
পালস পজিশন মড্যুলেশন (পিপিএম) সাধারণ তথ্য যোগাযোগের জন্য কম্পিউটার/অন্য ডিভাইসে বৈদ্যুতিক, অপটিক্যাল বা ইলেক্ট্রোম্যাগনেটিক পালস প্রেরণ করে কাজ করে। সুতরাং এটি উভয় ডিভাইসকে একই ঘড়ির সাথে সমন্বয় করতে হবে যাতে এটি একবার ডাল সম্প্রচারিত হওয়ার উপর ভিত্তি করে ডেটা ডিকোড করে। পর্যায়ক্রমে, ডিফারেনশিয়াল পালস পজিশন মডুলেশন নামক পিপিএম-এর আরও একটি ফর্ম সম্প্রচারের সময়ের মধ্যে পার্থক্যের উপর নির্ভর করে সমস্ত সংকেতকে এনকোড করার অনুমতি দেয়। এর মানে হল যে একটি রিসিভিং ডিভাইসকে একটি ট্রান্সমিশন ডিকোড করার জন্য আগমনের সময়ের মধ্যে শুধুমাত্র ভিন্নতা নিরীক্ষণ করতে হবে।
পালস পজিশন মডুলেশন সার্কিট
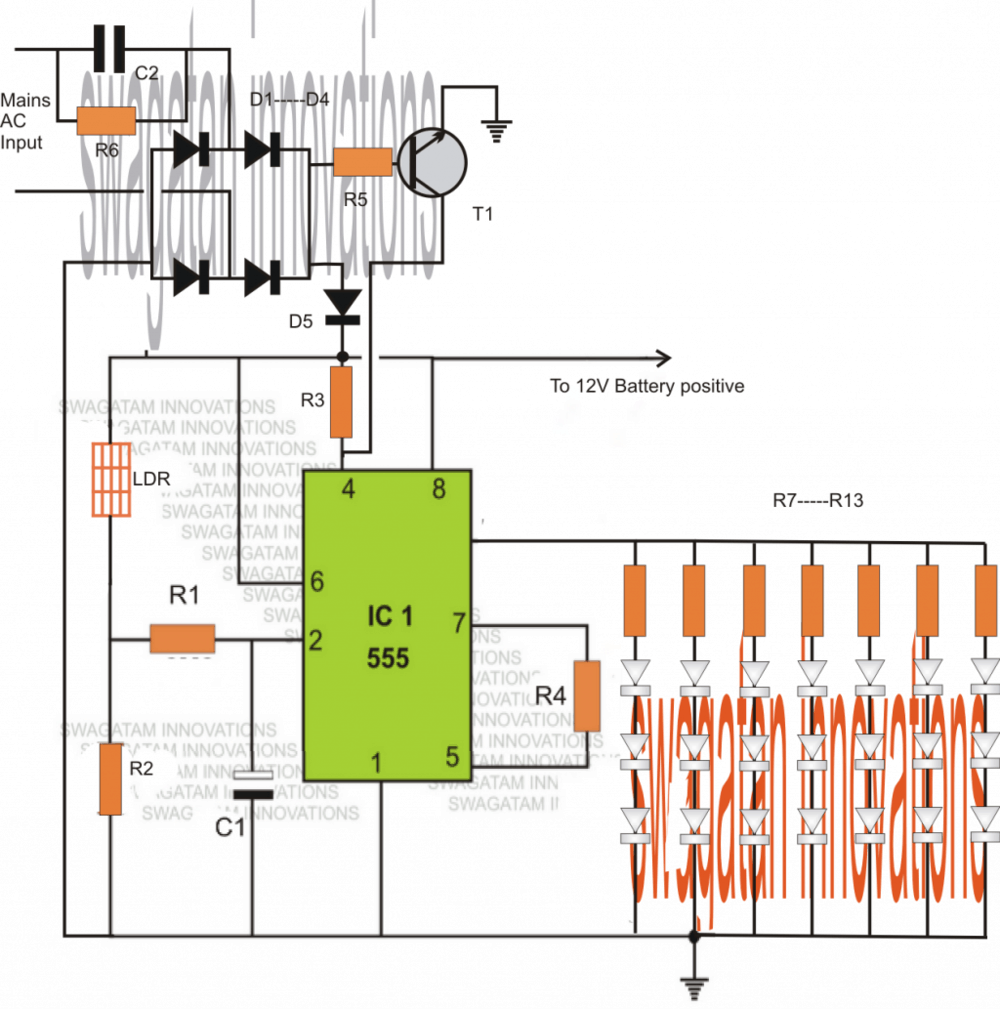
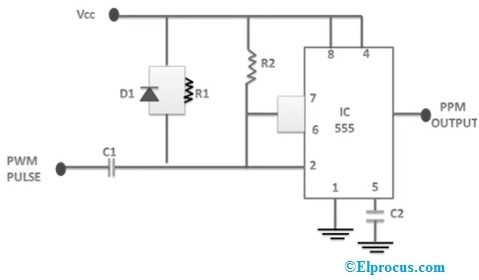
সাধারণত PPM-এ, ডালের প্রশস্ততা এবং প্রস্থ স্থিতিশীল রাখা হয় যেখানে রেফারেন্স পালস অবস্থানের রেফারেন্স সহ প্রতিটি পালসের বিন্যাস মড্যুলেটিং সিগন্যালের তাত্ক্ষণিক নমুনা মানের উপর ভিত্তি করে পরিবর্তিত হয়। একটি 555 টাইমার সহ পালস পজিশন মডুলেশনের সার্কিট ডায়াগ্রাম নীচে দেখানো হয়েছে।
এই সার্কিট যেমন বিভিন্ন ইলেকট্রনিক উপাদান দিয়ে তৈরি করা যেতে পারে 555 টাইমার আইসি , প্রতিরোধক R1 এবং R2, ক্যাপাসিটার যেমন C2 এবং C3, এবং ডায়োড D1. নিচের সার্কিট অনুযায়ী সংযোগ দিন।
মূলত, দ 555 আইসি এটি একটি মনোলিথিক আইসি যা একটি 8-পিন ডিআইপি প্যাকেজে উপলব্ধ। এটি একটি হিসাবে ব্যবহৃত অনেক অ্যাপ্লিকেশন ব্যবহার করা হয় স্থিতিশীল মাল্টিভাইব্রেটর এবং বিস্টেবল মাল্টিভাইব্রেটর ত্রিভুজাকার তরঙ্গ, বর্গাকার তরঙ্গ ইত্যাদি উৎপন্ন করতে। সুতরাং, পিপিএম-এর জেনারেশনকে 555 আইসি-এর একটি অ্যাপ্লিকেশন হিসেবেও বিবেচনা করা হয়।
555 IC সহ উপরের PPM সার্কিট ব্যবহার করে কিভাবে PPM সিগন্যাল তৈরি হয় তা দেখা যাক। PWM ডাল এবং PPM ডালগুলির একটি প্রজন্মের জন্য, 555 টাইমার একচেটিয়া মোডে কাজ করে। মোনোস্টেবল মোড হল মাল্টিভাইব্রেটরের একটি মোড। মাল্টিভাইব্রেটরগুলি সাধারণত ইলেকট্রনিক সার্কিট যেগুলির একটি বা দুটি স্থিতিশীল অবস্থা নেই। স্থিতিশীল অবস্থার উপর ভিত্তি করে, তিন ধরনের অস্থির, বিস্টেবল এবং একচেটিয়া মাল্টিভাইব্রেটর রয়েছে।
ইনপুট PWM পালস ডায়োড D1, প্রতিরোধক R, এবং ক্যাপাসিটর C1 দ্বারা গঠিত একটি পার্থক্যকারী নেটওয়ার্কের মাধ্যমে 555 IC-এর মতো ট্রিগার করা ইনপুটের পিন2-এ প্রয়োগ করা হয়। এখন pin2 এ প্রাপ্ত ইনপুটের উপর ভিত্তি করে, 555 টাইমার IC এর pin3 এ আউটপুট পাওয়া যাবে। আউটপুট R2 এবং C2 প্রতিরোধক দ্বারা নির্ধারিত সময়কালের জন্য উচ্চ থাকবে যাতে প্রতিটি নাড়ির প্রস্থ এবং প্রশস্ততা স্থির থাকে এবং আমরা আউটপুটে একটি PPM সংকেত পাব।
এইভাবে, 555 টাইমার আইসি একটি পিপিএম সংকেত তৈরি করতে ব্যবহৃত হয়।
সুবিধাদি
দ্য পালস পজিশন মড্যুলেশনের সুবিধা নিম্নলিখিত অন্তর্ভুক্ত.
- অন্যান্য মড্যুলেশনের তুলনায় পিপিএম-এর ক্ষমতা সবচেয়ে বেশি।
- এই মড্যুলেশন কম স্থিতিশীল প্রশস্ততা শব্দ হস্তক্ষেপ আছে.
- এই মড্যুলেশনটি একটি গোলমাল সংকেত থেকে সহজেই সিগন্যালকে আলাদা করে।
- PAM এর তুলনায় এটির কম শক্তি প্রয়োজন।
- সংকেত এবং শব্দের পৃথকীকরণ অত্যন্ত সহজ
- এটা ধ্রুবক প্রেরণ ক্ষমতা আউটপুট আছে.
- এই কৌশলটি একটি গোলমাল সংকেত থেকে সংকেত বিভক্ত করা সহজ।
- প্রশস্ততা এবং স্বল্প সময়ের স্পন্দনের কারণে এটির PAM এবং PDM এর তুলনায় অত্যন্ত কম শক্তি প্রয়োজন।
- এই ধরনের মড্যুলেশনে সহজ শব্দ অপসারণ এবং বিচ্ছেদ অত্যন্ত সহজ।
- স্থিতিশীল পালস প্রশস্ততা এবং প্রস্থের কারণে অন্যান্য মডুলেশনের তুলনায় পাওয়ার ব্যবহারও অত্যন্ত কম।
- পিপিএম একটি Tx থেকে একটি Rx-এ শুধুমাত্র সাধারণ কমান্ড যোগাযোগ করে, তাই এটির কম সিস্টেমের প্রয়োজনীয়তার কারণে এটি প্রায়শই লাইটওয়েট অ্যাপ্লিকেশনগুলিতে ব্যবহৃত হয়।
অসুবিধা
দ্য পালস পজিশন মড্যুলেশনের অসুবিধা নিম্নলিখিত অন্তর্ভুক্ত.
- পিপিএম খুবই জটিল।
- এটি PAM এর তুলনায় সংক্রমণের জন্য আরও ব্যান্ডউইথের প্রয়োজন।
- এটি প্রতিধ্বনির মতো বহু-পাথওয়ে হস্তক্ষেপের জন্য অত্যন্ত সংবেদনশীল যা প্রতিটি সংকেতের আগমনের সময়ের পার্থক্য পরিবর্তন করে একটি সংক্রমণকে বিরক্ত করতে পারে।
- ট্রান্সমিটার এবং রিসিভারের মধ্যে সিঙ্ক্রোনাইজেশন প্রয়োজন যা প্রতিবার সম্ভব নয় এবং এর জন্য আমাদের একটি ডেডিকেটেড চ্যানেল প্রয়োজন।
- এই ধরনের মড্যুলেশনের জন্য বিশেষ ডিভাইসের প্রয়োজন হয়।
অ্যাপ্লিকেশন
দ্য নাড়ি অবস্থান মড্যুলেশন অ্যাপ্লিকেশন নিম্নলিখিত অন্তর্ভুক্ত.
- পিপিএম মূলত টেলিকমিউনিকেশন সিস্টেম এবং এয়ার ট্রাফিক কন্ট্রোল সিস্টেমে ব্যবহৃত হয়।
- এই মড্যুলেশনটি রেডিও নিয়ন্ত্রণ, একটি অপটিক্যাল যোগাযোগ ব্যবস্থা এবং সামরিক অ্যাপ্লিকেশনগুলিতে ব্যবহৃত হয়।
- এই কৌশলটি প্লেন, রিমোট নিয়ন্ত্রিত গাড়ি, ট্রেন ইত্যাদিতে ব্যবহৃত হয়।
- পিপিএম অসঙ্গত সনাক্তকরণে ব্যবহৃত হয় যেখানে একটি রিসিভারের প্রয়োজন হয় না ফেজ লক লুপ অথবা ক্যারিয়ারের ফেজ ট্র্যাক করতে পিএলএল।
- এটি আরএফ (রেডিও ফ্রিকোয়েন্সি) যোগাযোগে ব্যবহৃত হয়।
- এটি উচ্চ-ফ্রিকোয়েন্সি, যোগাযোগহীন স্মার্ট কার্ড, রেডিও ফ্রিকোয়েন্সি আইডি ট্যাগ ইত্যাদিতেও ব্যবহার করা হয়।
এইভাবে, এই সব সম্পর্কে পালস পজিশন মড্যুলেশনের একটি ওভারভিউ - কাজ এবং এর অ্যাপ্লিকেশন। এখানে আপনার জন্য একটি প্রশ্ন, কি PWM ?