এই প্রকল্পে, আমরা কীভাবে তা আলোচনা করব মোটর গতি নিয়ন্ত্রণ করুন আরডুইনো পিডাব্লুএম সার্কিট ব্যবহার করে এবং ডিসি মটরটিতে কীভাবে বিপরীত সামনের বা দিক নিয়ন্ত্রণ নিয়ন্ত্রণ করতে হয় কয়েকটা পুশ বোতাম স্যুইচের মাধ্যমে আরডুইনো ব্যবহার করে। 30 এমপি অবধি যে কোনও উচ্চতর মোটর এই সেট আপটি ব্যবহার করে নিয়ন্ত্রণ করা যায়
দ্বারাঅঙ্কিত নেগি
বৈদ্যুতিক এবং ইলেকট্রনিক্সগুলিতে মোটর একটি অত্যাবশ্যক উপাদান কারণ এগুলি অনেক ক্ষেত্রে অ্যাকিউইউটর হিসাবে ব্যবহৃত হয়।
আমাদের ছোট অ্যাপ্লিকেশন যেমন রোবোটিক্সের পাশাপাশি ভারী মোটর ব্যবহৃত হয় (শিল্প ইত্যাদি) এর জন্য আমাদের মোটর প্রয়োজন।
এখন ছোট অ্যাপ্লিকেশনগুলির জন্য ব্যবহৃত মোটরগুলি সহজেই নিয়ন্ত্রণ করা যেতে পারে কারণ তারা খুব বেশি বর্তমান (2 ম্যাম্পের চেয়ে কম) নেয় না।
আর এই মোটরগুলি আরডুইনোর মতো মাইক্রোকন্ট্রোলার ব্যবহার করে সহজেই নিয়ন্ত্রণ করা যায় L298 বা L293D এর মতো মোটর ড্রাইভার আইকনগুলির মতো ।
তবে ভারী উদ্দেশ্যে (10 ম্যাম্পের চেয়ে বেশি) ব্যবহৃত মোটরগুলি নিয়ন্ত্রণ করা যায় না এই আইস এর ব্যবহার যেহেতু তারা সীমিত বর্তমান সরবরাহ করতে পারে (সর্বোচ্চ 2 ম্যাম্প) amp তাহলে এই মোটরগুলি কীভাবে নিয়ন্ত্রণ করা যায়?
উত্তরটি সহজ: রিলে ব্যবহার করে , যা সুইচ হিসাবে কাজ করে অর্থাত্ ছোট স্রোত ব্যবহার করে বড় স্রোত পরিবর্তন করে। এইভাবে দুটি জিনিস অর্জন করা যেতে পারে:
1. আমাদের হাই কারেন্ট নিজেই চালাচ্ছি।
২. সার্কিট বিচ্ছিন্ন করা, এভাবে কোনও ধাক্কা রোধ করা।
এই রিলে পরিবর্তন করতে এখন যে কোনও মাইক্রোকন্ট্রোলার ব্যবহার করা যেতে পারে। আমরা এখানে আরডুইনো ইউএনও ব্যবহার করব।
এই প্রকল্পের জন্য প্রয়োজনীয় সামগ্রীগুলি:
1. আরডুইনো ইউএনও: রিলের প্রাথমিক দিকটিতে ইনপুট লজিকগুলি দেওয়া।
২. এসপিডিটি রিলে -২: উভয় দিকে ঘোরার জন্য দুটি রিলে প্রয়োজন। উচ্চ বর্তমানের মোটর স্পেসিফিকেশনগুলি পরিচালনা করতে যোগাযোগগুলি অবশ্যই রেট করা উচিত

 3. পাওয়ার মোসফেট: আপনি আইআরএফ 1010 মোসফেট ব্যবহার করতে পারেন
3. পাওয়ার মোসফেট: আপনি আইআরএফ 1010 মোসফেট ব্যবহার করতে পারেন 
4. ব্যাটারি (12 ভি): মোটর থেকে বিদ্যুৎ সরবরাহ।
৫. দুটি পুশটন: আরডুইনোকে ইনপুট দেওয়ার জন্য (যেমন চাপলে এবং কখন চাপবে না)

T. দু'শ 10 কে রিসিস্টারস: ডিবিউসিংয়ের জন্য (নীচে ব্যাখ্যা করা হয়েছে)

7. সংযোগ স্থাপন তারের: সংযোগ তৈরির জন্য।
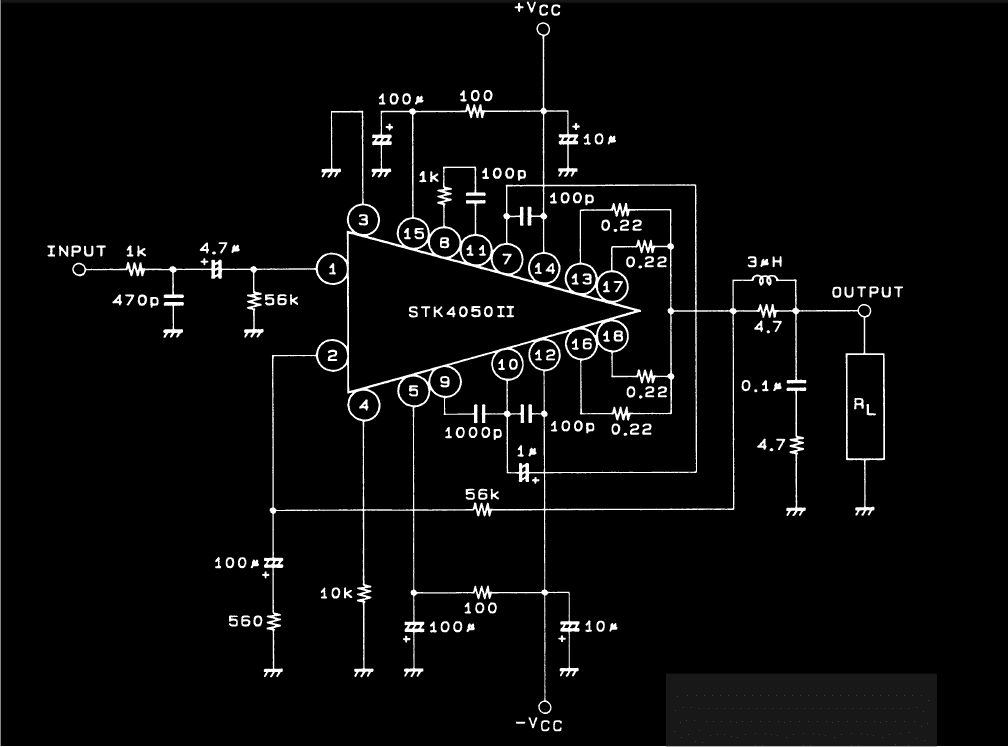
শাইম্যাটিক:

চিত্রে প্রদর্শিত হিসাবে সংযোগ তৈরি করুন।
১. রিলে উভয়ই সাধারণভাবে খোলা টার্মিনালটিকে ব্যাটারির ইতিবাচক টার্মিনালের সাথে এবং সাধারণত বন্ধ টার্মিনালের সাথে ব্যাটারির নেতিবাচক টার্মিনালে সংযুক্ত করুন।
2. প্রতিটি রিলে অবশিষ্ট টার্মিনাল (তিনটির মধ্যে) এর মধ্যে মোটরটি সংযুক্ত করুন।
৩. কোডটিতে এবং অন্যান্য টার্মিনালকে গ্রাউন্ডে উল্লিখিত আর্দুইনোর আউটপুট পিনের সাথে রিলে প্রাথমিক দিকের একটি টার্মিনাল সংযুক্ত করুন।
৪) কোডে বর্ণিত ইনপুট পিনগুলিতে আরডুইনোর 5v পিন এবং অন্যান্য টার্মিনালের সাথে উভয় পুশব্যাটনের একটি টার্মিনাল সংযুক্ত করুন।
৪। ** প্রতিরোধকারীদের সংযোগ করতে ভুলবেন না কারণ তারা এই সার্কিটটির যথাযথভাবে পরিচালনার জন্য অত্যন্ত গুরুত্বপূর্ণ, যেমনটি নীচে ব্যাখ্যা করা হয়েছে:
প্রতিস্থাপনকারীরা কেন সংযুক্ত?
আপনি দেখতে পাবেন যে আরডুইনোর ইনপুট পিনের সাথে কিছুই সংযুক্ত নেই, তবে এর অর্থ এই নয় যে নির্দেশিত সুইচটি খোলা থাকলে এই পিনআউটগুলি লজিকাল শূন্য হতে পারে
বরং এটি সূচিত করে যে স্যুইচটি যখন উন্মুক্ত থাকে তখন লজিক 0 এবং লজিক 1 এর মধ্যে যে কোনও র্যান্ডম মান নিতে পারে যা মোটেই ভাল নয় (এটি বাউন্সিং বলা হয়)।
সুতরাং আমরা এখানে যা চাই তা হ'ল যখন কোনও কিছুই ইনপুট পিনের সাথে সংযুক্ত না থাকে অর্থাত্ পুশবটন খোলা থাকে, আরডুইনো পিন থেকে 0 ইনপুট নেয়।
এবং এটি অর্জন করতে, পিনটি প্রতিরোধকের মাধ্যমে পুশবুটনের আগে স্থলভাগে সরাসরি সংযুক্ত থাকে। এটি যদি রেজিস্টার ছাড়াই স্থলভাগের সাথে সরাসরি সংযুক্ত থাকে তবে পিন স্থলভাগে ছোট হয়ে যাওয়ার সাথে সাথে প্রচুর পরিমাণে স্রোত প্রবাহিত হওয়ার ভাল সম্ভাবনা রয়েছে। এটি প্রতিরোধ করতে, একটি রেজিস্টার এর মধ্যে সংযুক্ত থাকে।
পিনে 0 এ লজিক টানছে বলে এই প্রতিরোধকটিকে পুলডাউন রেজিস্টার বলা হয় এবং এই প্রক্রিয়াটিকে ডিবসনিং বলা হয়।
কোড:
আপনার আরডুইনোতে এই কোডটি বার্ন করুন।
int x// initialise variables
int y
int z
int w
void setup() {
pinMode(6,OUTPUT)//initialise pin 6 as output to RL1
pinMode(9,OUTPUT)//initialise pin 9 as output to RL2
pinMode(3,INPUT)//initialise pin 3 as input
pinMode(4,INPUT)//initialise pin 4 as input
pinMode(10,OUTPUT)//initialise PWM pin 8 as output to gate of mosfet
pinMode(A0,INPUT)//initialise pin A0 as input from pot.
Serial.begin(9600)
}
void loop() {
z=analogRead(A0)// read values from potentiometer in terms of voltage
w= map(z,0,1023,0,255)// map those values from 0 to 255
analogWrite(10,w)// write the mapped value to 10thpin as output
delay(1)//on time period of mosfet
analogWrite(10,w)
delay(1)//off time period of ,mosfet
Serial.println(z)//print value from pot to serial monitor
Serial.println(w)//print mapped value to serial monitor
x= digitalRead(3)
y= digitalRead(4)
if(x==0 && y==0){digitalWrite(6,LOW)//hault motor
digitalWrite(9,LOW)}
if(x==1 && y==0){digitalWrite(6,HIGH)// clockwise rotation of motor
digitalWrite(9,LOW)}
if(x==0 && y==1){digitalWrite(6,LOW)// anticlockwise rotation of motor
digitalWrite(9,HIGH)}
if(x==1 && y==1){digitalWrite(6,LOW)//hault motor
digitalWrite(9,LOW)
}
}
কাজ (কোড বোঝার):
RE নির্দেশ নিয়ন্ত্রণ:
উ: যখন উভয় পুশব্যাটনের চাপ দেওয়া হবে না:
এই অবস্থায়, আরডুইনো উভয় পিন থেকে 0 ইনপুট নেয়। এই শর্তে কোডে নির্দিষ্ট হিসাবে উভয় আউটপুট পিন 0 লজিক (LOW) দেয়:
যদি (x == 0 && y == 0) {ডিজিটাল লিখন (6, কম)
ডিজিটাল রাইট (9, নিম্ন)}
যেহেতু উভয় রিলে প্রাথমিকের ইনপুট ভোল্টেজ উভয়টির শূন্য মাধ্যমিক টার্মিনাল স্বাভাবিকভাবে বন্ধ অবস্থায় থাকে। সুতরাং মোটর উভয় টার্মিনাল এ শূন্য ভোল্ট আছে, কোন ঘূর্ণন কারণ।
বি। পুশ বোতামটি এক্স চাপলে কিন্তু Y টিপবে না:
এই অবস্থায়, আরডুইনো পিন 4 থেকে 0 ইনপুট নেয় তবে পিন 3 থেকে ইনপুট 1 নেয়। এই শর্তে কোডে বর্ণিত হিসাবে পিন 6 লজিক 1 (HIGH) এ থাকতে হবে যেখানে 9 লজিক 0 (LOW) এ পিন করা উচিত:
যদি (x == 1 && y == 0) {ডিজিটাল লিখন (6, উচ্চ)
ডিজিটাল রাইট (9, নিম্ন)}
যেহেতু রিলে # 1 এর ইনপুট ভোল্টেজ বেশি, তাই এই রিলেটির স্যুইচটি স্বাভাবিকভাবে খোলা অবস্থায় ফেলে দেওয়া হয় যেখানে রিলে 2 এর ইনপুট ভোল্টেজ কম থাকে, এই রিলেটির স্যুইচটি মোটর টার্মিনালগুলিতে যথাক্রমে 12v এবং 0v এর কারণ হিসাবে বন্ধ হয়ে যায় causing এক দিকে মোটর ঘূর্ণন।
গ। পুশ বাটন যখন টিপানো হয় তবে এক্স চাপানো হয় না:
এই অবস্থায়, আরডুইনো পিন 4 থেকে 1 ইনপুট নেয় তবে পিন 3 থেকে ইনপুট 0 নেয়। এই শর্তে কোডে বর্ণিত পিন 6 লজিক 0 (LOW) এ থাকতে হবে তবে লিনিক 1 (HIGH) এ পিন 9 হওয়া উচিত:
যদি (x == 1 && y == 0) {ডিজিটাল লিখন (6, কম)
ডিজিটাল রাইট (9, উচ্চ)}
যেহেতু এবার রিলে # 2 এ ইনপুট ভোল্টেজ বেশি, তাই এই রিলেটির স্যুইচটি স্বাভাবিকভাবে খোলা অবস্থায় ফেলে দেওয়া হয় যেখানে রিলে # 1 এর ইনপুট ভোল্টেজ কম থাকে, এই রিলেটির স্যুইচটি মোটর বরাবর যথাক্রমে 12v এবং 0v হয়ে যাওয়ার কারণে স্বাভাবিকভাবে বন্ধ অবস্থায় থাকে remains টার্মিনালগুলি, অন্য দিকে মোটর ঘূর্ণনের কারণ।
D. যখন উভয় পুশবটনগুলি চাপ দেওয়া হয়:
এই অবস্থায়, আরডুইনো দুটি পিন থেকে 1 ইনপুট নেয়। কোড হিসাবে এই শর্তে উল্লেখ করা হয়েছে উভয় আউটপুট পিন 0 লজিক (LOW) দেয়:
যদি (x == 0 && y == 0) {ডিজিটাল লিখন (6, কম)
ডিজিটাল রাইট (9, নিম্ন)}
যেহেতু উভয় রিলে প্রাথমিকের ইনপুট ভোল্টেজ উভয়টির শূন্য মাধ্যমিক টার্মিনাল স্বাভাবিকভাবে বন্ধ অবস্থায় থাকে। সুতরাং মোটর উভয় টার্মিনাল এ শূন্য ভোল্ট আছে, কোন ঘূর্ণন কারণ।
• গতি নিয়ন্ত্রণ:
আসুন আমরা বলি যে পেন্টিওমিটার এমন অবস্থানে রয়েছে যখন এটি আরডুইনোর A0 পিনকে ইনপুট হিসাবে 0 ভোল্ট দেয়। এর কারণে, আরডুইনো এই মানটিকে 0 হিসাবে মানচিত্র করে এবং এভাবে পিন # 10 এ আউটপুট হিসাবে পিডাব্লুএম দেয় 0,
অ্যানালগ রাইট (10,0) // ম্যাপযুক্ত মানটি 10 ম পিনকে আউটপুট হিসাবে লিখুন
সুতরাং মোসফেটের গেটটি 0 কারেন্ট পায় যার কারণে এটি বন্ধ থাকে এবং মোটরটি স্যুইচড অফ অবস্থায় থাকে।
যাইহোক, পাত্রটি ঘোরানো হয় এবং পাত্রের মান বৈচিত্রময় হয়, পিন A0 এ ভোল্টেজও পরিবর্তিত হয় এবং এই মানটি পিন # 10 এ ম্যাপ করা হয় আনুপাতিকভাবে পিডাব্লুএম প্রস্থের সাথে প্রসারিত হয়, মোটর এবং মোসফেটের মাধ্যমে আরও প্রবাহিত হয় নিকাশ, যার ফলে মোটরটি আনুপাতিকভাবে আরও গতি অর্জন করতে দেয় এবং বিপরীতে একই ঘটনা ঘটে।
সুতরাং উপরোক্ত আলোচনা থেকে আমরা দেখতে পাচ্ছি যে কীভাবে একটি আর্দুইনো নির্দিষ্ট গর্তকে সামঞ্জস্য করে এবং বেশ কয়েকটি পুশ বোতামের মাধ্যমে কেবলমাত্র একটি উচ্চ বর্তমান ডিসি মোটরের দিক (বিপরীত দিকে) নিয়ন্ত্রণ করতে ব্যবহৃত হতে পারে।
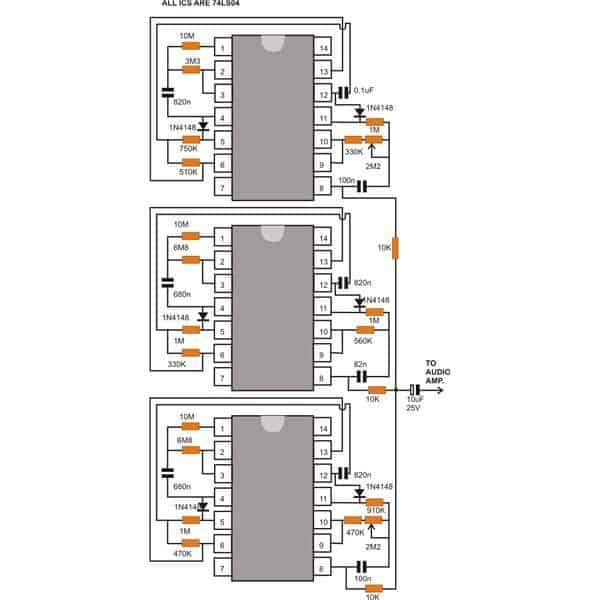
হালনাগাদ : হাই কারেন্ট মোটরের জন্য, নিম্নোক্ত পরিবর্তিত ডায়াগ্রামে উল্লিখিত এই উচ্চ পাওয়ার রিলে পরিচালনার জন্য দয়া করে 12V / 30 এমপি রিলে এবং বিজেটি ড্রাইভার স্টেজ ব্যবহার করুন:

পূর্ববর্তী: অ্যালার্মের সাথে গাড়ি বিপরীতে পার্কিং সেন্সর সার্কিট পরবর্তী: আরডুইনো পিডাব্লুএম সিগন্যাল জেনারেটর সার্কিট