পোস্টটিতে কোনও মাইক্রোকন্ট্রোলার বা জটিল জোস্টস্টিক বাস্তবায়ন ছাড়াই 433kHz আরএফ মডিউলগুলি ব্যবহার করে একটি সাধারণ আরসি হেলিকপ্টার রিমোট কন্ট্রোল সার্কিট নিয়ে আলোচনা করা হয়েছে।
এই ধারণাটি অনুরোধ করেছিলেন জিতেন্দ্র সাহেব।
সার্কিটের উদ্দেশ্য এবং প্রয়োজনীয়তা
- আমি বড় আকারের আরসি হেলিকপ্টার তৈরি করছি। যার মধ্যে আমি 4 টি মোটর ব্যবহার করছি। 1 ম প্রধান 12 ভি মোটরের জন্য: প্রক্রিয়াটি হ'ল আমি চাই যে এর গতিটি 0 থেকে সম্পূর্ণ গতিতে দূরবর্তীের একটি নিয়ামক কী দ্বারা নিয়ন্ত্রিত হোক।
- ২ য় 3 ভি মোটরের জন্য: প্রতিটি মটরের জন্য দূরবর্তীটিতে স্বতন্ত্র কী সহ কেবলমাত্র এগিয়ে এবং বিপরীত ঘূর্ণনের জন্য এটির প্রক্রিয়াটি কারণ এটি রোটরের সোয়াশ প্লেটগুলি পরিচালনা করবে।
- তৃতীয় 9 ভি টেল মোটরের জন্য: এটি হেলিকপ্টারটির রিসিভার বোর্ডে নিয়ন্ত্রক ব্যবহার করে একটি ভারসাম্য গতিতে সেট করা উচিত যাতে আমি চপ্পারটি থামাতে ম্যানুয়ালি গতিটি সামঞ্জস্য করতে পারি .. রোটারগুলির সাথে ঘোরানো থেকে, এবং একটি কী আছে রিমোটটি হ্রাস করা এবং তার ভারসাম্যটি থেকে মোটরটিকে গতিময় করা হবে।
- রিসিভার বোর্ডে ইনপুট পাওয়ারটি 12 ভি এবং বর্তমান 8-10 এমপিয়ার হবে। এটি 500-800 মিটার ব্যাপ্তির হওয়া উচিত। স্যার আপনি দয়া করে রিমোট সহ এই জাতীয় আরসি সার্কিট বোর্ড ডিজাইন করতে পারেন।
- আমি গত দু'বছর ধরে এ জাতীয় সার্কিট বোর্ডের সন্ধানে আছি।
- আমার প্রকল্পটি এটির অনুপস্থিতির কারণে বন্ধ হয়ে গেছে। স্যার আমাকে সাহায্য করুন। আপনার সুবিধার জন্য আপনি দুটি পৃথক আরসি সার্কিট বোর্ড ডিজাইন করতে পারেন একটি প্রধান মোটর এবং লেজ মোটরের জন্য এবং অন্য দুটি এগিয়ে এবং বিপরীত ঘোরানো মোটরগুলির জন্য ors
- তবে উভয় সার্কিটের ইনপুট বর্তমান এবং সম্ভাব্য পার্থক্য একই দূরত্বের হতে হবে যা এর দূরবর্তী বা দূরবর্তী সহ 500-800 মিটার। সংখ্যার সাথে প্রয়োজনীয় উপাদানগুলির নামও উল্লেখ করুন।
নকশা
প্রস্তাবিত আরসি হেলিকপ্টার তৈরির জন্য প্রয়োজনীয় অনুরোধ করা সার্কিট মডিউলগুলি হ'ল:
1) একটি 12 ভি পিডাব্লুএম ভেরিয়েবল স্পিড কন্ট্রোলার
2) একটি 3 ভি মোটর বিপরীতমুখী নিয়ন্ত্রণকারী সার্কিট।
3) একটি ভেরিয়েবল স্পিড কন্ট্রোলার সার্কিট সহ একটি 9 ভি মোটর নিয়ন্ত্রক।
উপরের সমস্ত বৈশিষ্ট্যগুলি একটি দীর্ঘ পরিসরের 433MHz এর মাধ্যমে নিয়ন্ত্রণ করা দরকার আরএফ রিমোট কন্ট্রোল মডিউল ।
পছন্দসই 433MHz আরএফ রিমোট মডিউলটি কোনও অনলাইন স্টোর বা আপনার নিকটস্থ ইলেকট্রনিক ডিলারের কাছ থেকে সংগ্রহ করা যেতে পারে। রিমোট কন্ট্রোলের ব্যাপ্তি আরসি হেলিকপ্টার পরিসরের প্রয়োজনীয় স্পেসিফিকেশন অনুযায়ী হওয়া উচিত, এখানে এটি 1 কিলোমিটারের মধ্যে থাকার কথা।
আলোচিত আরসি হেলিকপ্টার রিমোট কন্ট্রোল সার্কিটের জন্য, একটি 6 চ্যানেল আরএফ রিমোট মডিউল প্রয়োজন হবে যা আমাদের আগের জন্য ব্যবহৃত হয়েছিল ঠিক তার অনুরূপ সবচেয়ে সহজ ড্রোন রিমোট কন্ট্রোল সার্কিট ।
একই চিত্রটি নীচে প্রত্যক্ষ করা যেতে পারে:

বাম পাশের গ্রিন বোর্ডটি রিমোট রিসিভার মডিউল যা ছয়টি কন্ট্রোল রিলে রয়েছে এবং প্রয়োজনীয় ইউনিটগুলির জন্য এই ইউনিটগুলি আরসি হেলিকপ্টারটিতে ইনস্টল করা প্রয়োজন installed
ডান পাশের ইউনিট হ'ল ট্রান্সমিটার হ্যান্ডসেট যা ব্যবহারকারী এবং সংশ্লিষ্ট বোতাম সম্পর্কিত গতি নিয়ন্ত্রণ তথ্যের সাথে রিলে বোর্ডের কমান্ডিংয়ের জন্য চেপে ধরেছিল বলে মনে করা হচ্ছে।
নীচের বিবরণ থেকে আর সি চপারের অভ্যন্তরে কীভাবে ছয়টি রিলে বিভিন্ন পিডাব্লুএম সার্কিটের সাথে কনফিগার করা এবং ইনস্টল করা দরকার তা দেখুন:
রিসিভার বোর্ডে দেখানো রিলে পরিচিতিগুলি ডিফল্টরূপে সমস্ত ফাঁকা রয়েছে, যার অর্থ তাদের এন / সি এবং এন / ও পরিচিতিগুলি তারযুক্ত নয় এবং নিম্নলিখিত চিত্রগুলিতে বর্ণিত হিসাবে তারযুক্ত হওয়া আবশ্যক।
অনুরোধ অনুসারে, 9V মোটর এবং 12 ভি মোটর গতি নিয়ন্ত্রণের প্রয়োজন রিমোট হ্যান্ডসেটের পরবর্তী টিপুনের মাধ্যমে। এই ফাংশনটি বাস্তবায়নের জন্য সার্কিটগুলি নীচে দেখানো হয়েছে:
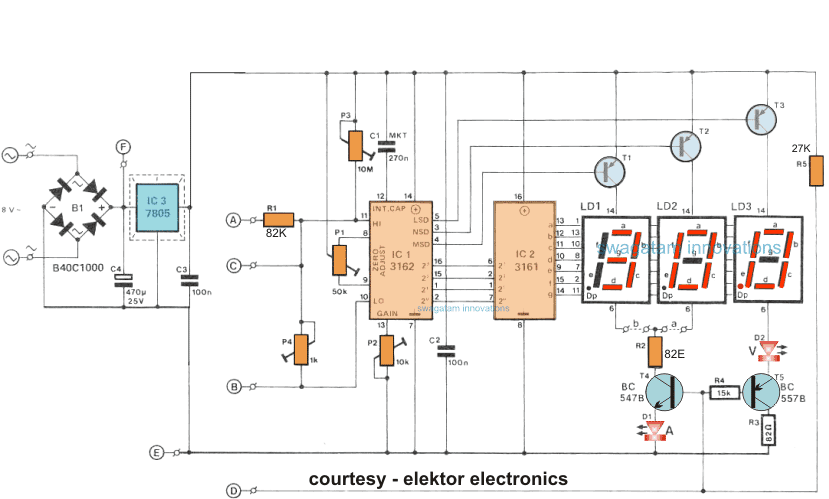
মোটর ড্রাইভার স্কিম্যাটিক


সার্কিট অপারেশন
যেমনটি স্কিমেটিক্সে দেখা যাবে, অভিন্ন একটি দম্পতি আইসি 555 পিডাব্লুএম সার্কিট কাজের জন্য নিযুক্ত করা হয়। ছয়টি রিলেগুলির মধ্যে চারটি এখানে দেখানো সংযোগগুলিতে তারযুক্ত প্রাসঙ্গিক যোগাযোগের সাথে নিযুক্ত রয়েছে।
নকশায় আইসি 555 একটি বুনিয়াদী আশ্চর্যজনক সার্কিট হিসাবে rigged হয়, কিছু নির্দিষ্ট ফ্রিকোয়েন্সি সহ দোলকে নির্ধারিত এর আর 1, আর 2, এবং সি উপাদানগুলির মানগুলির উপর নির্ভর করে ।
নির্দেশিত রিলে ক্রিয়াকলাপ অনুসারে আইসি 555 এর পিন # 3 এ পিডাব্লুএমএম বিষয়বস্তু পরিবর্তনের জন্য আইসি 741 আকারে একটি ভোল্টেজ অনুসরণকারী আইসি 555 এর নিয়ন্ত্রণ পিন # 5 দিয়ে কনফিগার করা হয়েছে।
আইসি 1৪১ এর পিন # 3 এ ভোল্টেজটি অনুসরণ করা হয় বা পিন # 6 এ স্থানান্তরিত হয় এবং পরে আইসি 555 এর # 5 পিন করতে হয় 3 পিন # 3 ক্যাপাসিটরের চার্জের স্তরের উপর নির্ভর করে এই ভোল্টেজ সরবরাহের ভোল্টেজের সীমা এবং কোথাও কোথাও হতে পারে be শূন্য।
ক্যাপাসিটারের চার্জের স্তরটি কেবলমাত্র চার্জ করে বা সম্পর্কিত রিলে যোগাযোগের অ্যাক্টিভেশনটির মাধ্যমে ছাড়িয়ে আলাদা বা পরিবর্তিত হয়। উপরের রিলে যোগাযোগটি চার্জ করতে আইসি 555 এর পিন # 5 এ একটি ক্রমবর্ধমান ভোল্টেজ সক্ষম বা সক্রিয় করা হয়েছে যখন নিম্ন রিলে পরিচিতিগুলি সক্রিয়করণ ক্যাপাসিটরকে স্রাব করে যার ফলে আনুপাতিকভাবে কম ভোল্টেজ আইসি 555 এর পিন # 5 এ প্রদর্শিত হয়।
উপরের ক্রিয়াগুলি পিন # 3 ফলাফলগুলিকে আনুপাতিকভাবে পরিবর্তিত পিডাব্লুএমগুলিতে অনুবাদ করে যার ফলস্বরূপ মোটরটি হয় দ্রুততর বা ধীর হয়ে যায়।
ড্রাইভার ট্রানজিস্টারের ইমিটারে ডায়োডের একটি সিরিজ সংযুক্ত দেখা যায়, এটি ভোল্টেজের প্রয়োজনীয় ড্রপকে নিশ্চিত করে এবং মোটরটির নির্দিষ্টকরণগুলি অনুসারে 12 ভিটিকে আনুমানিক 10 ভি নিয়ন্ত্রিত সরবরাহে রূপান্তরিত করতে সহায়তা করে।
3 ভি মোটর রিভার্স ফরওয়ার্ড অপারেশন
অনুরোধে তৃতীয় এবং শেষ দাবিটি এর জন্য বিপরীত / ফরোয়ার্ড নিয়ন্ত্রণ আরএফ ট্রান্সমিটার হ্যান্ডসেট বোতাম টিপ ব্যবহার করে 3 ভি মোটর।
বাকি দুটি রিলে এখন এই নির্দিষ্ট মৃত্যুদন্ডের জন্য ব্যবহৃত হতে পারে এবং নিম্নলিখিত চিত্রটিতে প্রদর্শিত হিসাবে এটি করা হয়:

এখানেও আমরা সুনির্দিষ্ট PWM জেনারেটর সার্কিট হিসাবে তারযুক্ত বহুমুখী আইসি 555 নিয়োগ করি emplo PWM 5K প্রিসেটের মাধ্যমে ইনস্টলেশনগুলি চূড়ান্ত করার আগে যথাযথভাবে সেট করা হয় যে হেলিকপ্টারটির প্রয়োজনীয় ভারসাম্যের জন্য মোটরের গতি পুরোপুরি সমন্বিত হয়।
রিলেগুলি কেবল প্রয়োজনীয় বিপরীতগুলি প্রয়োগ করার জন্য, এবং পেয়ারড রিলে যোগাযোগের টগলিংয়ের প্রতিক্রিয়ায় মোটরটির জন্য একটি ঘড়ির কাঁটা বা অ্যান্টলিকওয়াস মোশন কেবলমাত্র তারযুক্ত দেখা যায়, যা একসাথে একটি ডিপিডিটি রিলে গঠন করে।
একটি শর্ট সার্কিট প্রতিরোধের জন্য, এই দুটি রিলে অগ্রাধিকার জন্য রিসিভার মডিউলটি সংশোধন করতে হবে যেমন দুটি বাটন চাপলে উভয় রিলে একসাথে সক্রিয় হয়ে যায় বরং দুটি স্যুইচ অ্যাক্টিভেশনটির জন্য সিঙ্কে চাপতে হবে তার উপর নির্ভর করে টানগুলি একসাথে সক্রিয় করতে পারে।
এই টগলিংটি তত্ক্ষণাত্ আরসি হেলিকপ্টার মেশিনে ব্যবহারকারীকে প্রয়োজনীয় দিকনির্দেশক পরিবর্তনগুলি সম্পাদন করতে দিয়ে বিপরীত দিকের মোটর ঘূর্ণনটি উল্টাতে পারে বলে আশা করা যায়।
এটি প্রস্তাবিত আরসি হেলিকপ্টার রিমোট কন্ট্রোল সার্কিটের জন্য সার্কিট এবং রিলে তারের নির্দেশাবলী সমাপ্ত করে, আরও সন্দেহের জন্য দয়া করে আপনার মন্তব্যের মাধ্যমে সেগুলি প্রকাশ করতে দ্বিধা করবেন না।
পূর্ববর্তী: অতিস্বনক স্মার্ট স্বয়ংক্রিয় অন / অফ স্যুইচ সার্কিট পরবর্তী: একক মোসফেট ক্লাস এ পাওয়ার এম্প্লিফায়ার সার্কিট