এই পোস্টে আমরা একটি পছন্দসই গতিবিধির সেট সহ ইনকিউবেটর মোটর প্রক্রিয়া পরিচালনা করার জন্য একটি বিপরীত ফরোয়ার্ড টাইমার সার্কিট শিখি। ধারণাটি অনুরোধ করেছিলেন মিঃ আনোয়ার
প্রযুক্তিগত বিবরণ
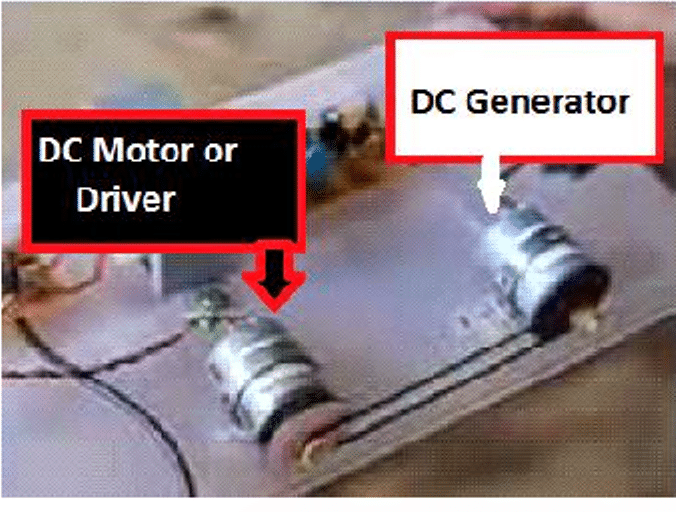
আমি ইন্দোনেশিয়া থেকে আছি ..... হাই টর্ক মোটর (গাড়িতে ডিসি মোটর পাওয়ার উইন্ডো) সহ ইনকিউবেটর টাইমারের জন্য আমার স্কিম্যাটিক্স দরকার। আমি একটি ডিসি মোটর দুটি দিক দিয়ে চালানোর জন্য চেষ্টা করছি যতক্ষণ না এটি শেষ অবস্থানে পৌঁছায় ততক্ষণ বন্ধ করুন এবং মেরুটি স্যুইচ করুন যাতে বিদ্যুৎ পুনরায় প্রয়োগ হওয়ার পরে এটি অন্য দিকে চালিত হবে। তারপরে অন্য প্রান্তে একই জিনিস করুন।
1. টাইমার 1 মিনিটের জন্য পাওয়ার চালু করে। (সকাল 7: 00 -7: 01 টা)
২. সেক্টরে বলুন যে মোটর স্টপ পজিশনে আঘাত না হওয়া অবধি একদিকে চালিত হয়।
৩. মোটর থেকে পাওয়ার বন্ধ হয়ে যায় যখন এটি স্টপ অবস্থান এবং 1 মিনিটের জন্য বিলম্ব করে। টাইমার প্রধান শক্তি বন্ধ / বন্ধ করতে। এছাড়াও মেরুতা বিপরীত।
৪. পরের বারের প্রধান টাইমারটি আসার পরে (10: 00-10: 01) এটি একই জিনিসটিকে বিপরীত দিক এবং ক্রমাগত পুনরাবৃত্তি করে
5. 12 ভিডিসি মোটর বিপরীত (মোটর থেকে কেবল দুটি কেবল এবং -)
Rev. রেভ / এফডাব্লুড মোটরের জন্য নেতৃত্বের সূচক প্রয়োজন
আপনি কি আমাকে সাহায্য করতে পারেন স্যার?
যেকোনো সাহায্যের জন্য অগ্রিম ধন্যবাদ।
এটি একটি গুরুত্বপূর্ণ হোম প্রকল্প যা 100% নির্ভরযোগ্য হওয়া দরকার।
নকশা

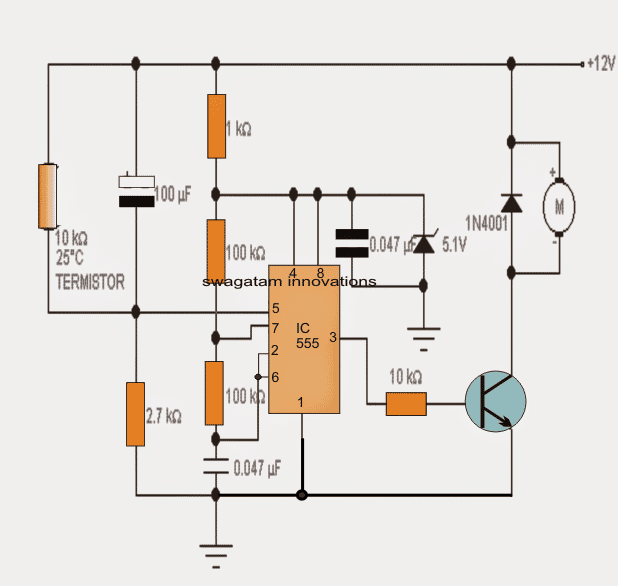
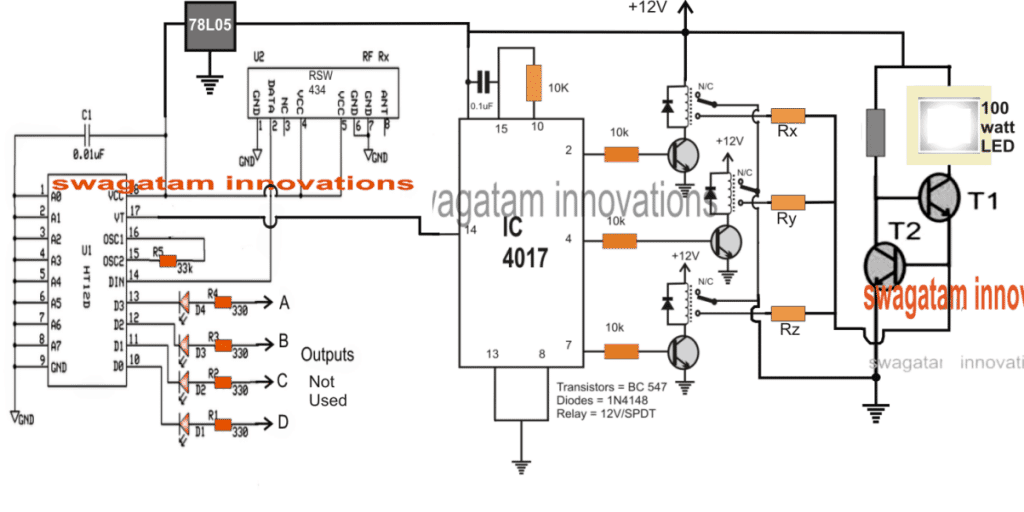
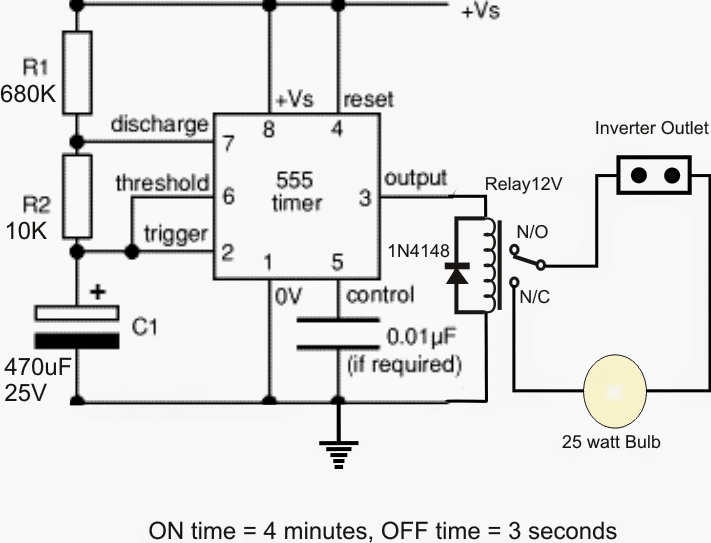
উপরের চিত্রটিতে আমরা সময়ের ব্যবধানের পূর্বনির্ধারিত সেট পরে ইনকিউবেটর মোটরের প্রস্তাবিত রিভার্স ফরোয়ার্ড গতি বাস্তবায়নের জন্য একটি নকশা কল্পনা করতে পারি।
তাত্ক্ষণিক সময়ে যখন পাওয়ারটি স্যুইচ করা থাকে তখন আমাদের নীচের পরিস্থিতি থাকে:
'সেট' এর চৌম্বকীয় স্যুইচটি কোনও নিষ্ক্রিয় অবস্থায় বা হতাশাগ্রস্থ অবস্থায় অনুভূত হতে পারে যখন মোটর বা ডিজাইন করা ইনকিউবেটর প্রক্রিয়াটি তার শূন্য অবস্থানে থাকে।
দয়া করে নোট করুন যে পছন্দ হিসাবে চৌম্বকীয় রিড সুইচগুলি ব্যবহার করে 'সেট' / 'রিসেট' স্যুইচগুলি প্রয়োগ করা উচিত।
পাওয়ারটি চালু হওয়ার সাথে সাথে আইসি 4060 সি 2 এর মাধ্যমে পুনরায় সেট করা হয় যাতে এটি শূন্য থেকে গণনা প্রক্রিয়া শুরু করে এবং পিন 3 একটি শূন্য যুক্তিযুক্ত হয়।
এই প্রাথমিক শূন্য যুক্তি সি 3 এর মাধ্যমে টি 1 এর গোড়ায় খাওয়ানো হয় যা তত্ক্ষণাত্ টি 3 এবং এটি সম্পর্কিত রিলেকে সক্রিয় করতে বাধ্য করে। প্রক্রিয়াতে আর 7 টি এই মোডে টি 1 / টি 3 লেচড হওয়া নিশ্চিত করে।
ডিপিডিটি রিলে এই মুহুর্তে তার এন / ও পরিচিতিগুলি মোটর এবং প্রক্রিয়াটিকে ধরে নেওয়া 'ফরোয়ার্ড' গতির দিকে পরিচালিত করে contacts
মোটরটি চলতে শুরু করার সাথে সাথে 'সেট' বোতামটি এমনভাবে প্রকাশিত হয় যে টি 4 এবং উচ্চতর এসপিডিটি কার্যকর করার সুযোগ পায়, যেখানে এসপিডিটি রিলে স্ট্যান্ডবাইয়ের সাথে ডিপিডিটির এন / সি পরিচিতিগুলি সরবরাহ করে একটি এন / ও পজিশন চেঞ্জওভার অর্জন করে সরবরাহ ..
মোটর এবং / অথবা প্রক্রিয়াটি 'রিসেট' অবস্থান অর্জন না হওয়া অবধি চলমান রাখে যার ফলে টি 2 টি টি 1 / টি 4 ল্যাচকে সক্রিয় এবং ভেঙে দেয়।
টি 4 সুইচ অফ দিয়ে, ডিপিডিটি রিলে N / O থেকে N / C তে এর অবস্থান পরিবর্তন করে এবং মোটর প্রক্রিয়াতে একটি বিপরীত (বিপরীত) আন্দোলন সরবরাহ করে।
ইনকিউবেটর মোটর প্রক্রিয়াটি এখন তার দিককে সরিয়ে নিয়ে একটি বিপরীত গতি শুরু করে যতক্ষণ না এটি 'সেট' পয়েন্টে পৌঁছে যায় যা দ্রুত টি 4 এর বেস ড্রাইভটি সুইচ করে, এসপিডিটি ডিপিডিটির কাটিয়া পাওয়ার বন্ধ করে দেয় এবং পুরো প্রক্রিয়াটি স্থির হয়ে দাঁড়ায় ।
ইতিমধ্যে আইসি 4060 গণনা অব্যাহত রেখেছে যতক্ষণ না এটি তার পিন 3 (সি 3 ছাড়িয়ে) উচ্চ লজিকের পরে আবার শূন্য যুক্তি তৈরি করে produced
চক্রটি আবার শুরু হয়ে যায় এবং উপরে বর্ণিত পদ্ধতিটি পুনরাবৃত্তি করে।
পূর্ববর্তী: আরডুইনো দিয়ে একটি এলইডি জ্বলজ্বলে - সম্পূর্ণ টিউটোরিয়াল পরবর্তী: হাই পাওয়ার ইন্ডাস্ট্রিয়াল মেইনস সার্জ সাপ্রেসার অন্বেষিত