প্রস্তাবিত 4 কেভিএর এই প্রথম অংশটি সিঙ্ক্রোনাইজ হয়েছে স্ট্যাকেবল বৈদ্যুতিন সংকেতের মেরু বদল সার্কিট বৈদ্যুতিন সংকেতের মেরু বদল একে অপরের থেকে স্বতঃস্ফূর্ত চলমান রাখতে এখনও একে অপরের সাথে সমানভাবে আউটপুট অর্জনের জন্য ফ্রিকোয়েন্সি, ফেজ এবং ভোল্টেজের সাথে সম্পর্কিত 4 ইনভার্টারগুলিতে কীভাবে গুরুত্বপূর্ণ স্বয়ংক্রিয় সিঙ্ক্রোনাইজেশন প্রয়োগ করতে হবে তা আলোচনা করে।
এই ধারণাটি অনুরোধ করেছিলেন মিঃ ডেভিড। তার এবং আমার মধ্যে নিম্নলিখিত ইমেল কথোপকথনে প্রস্তাবিত সিঙ্ক্রোনাইজড 4 কেভি স্ট্যাকিয়েবল বৈদ্যুতিন সংকেতের মেরু বদল করার মূল চক্রের বিবরণ দেওয়া আছে।
ইমেল # 1
হাই স্বগতম,
প্রথমত আমি বিশ্বের কাছে আপনার অবদানের জন্য আপনাকে ধন্যবাদ জানাতে চেয়েছিলাম, তথ্যটি এবং সবচেয়ে গুরুত্বপূর্ণভাবে আমার জ্ঞানে অন্য লোককে সহায়তা করার জন্য আপনার জ্ঞান ভাগ করে নেওয়ার আপনার ইচ্ছা অনেক কারণেই অমূল্য।
আমার নিজের উদ্দেশ্য অনুসারে আপনি ভাগ করেছেন এমন কয়েকটি সার্কিট আমি বাড়িয়ে তুলতে চাই, দুর্ভাগ্যক্রমে যখন আমি বুঝতে পারি যে সার্কিটগুলিতে কী চলছে তা আমার নিজের মধ্যে সংশোধন করার সৃজনশীলতা এবং জ্ঞানের অভাব রয়েছে।
আমি সাধারণত সার্কিটগুলি অনুসরণ করতে পারি যদি সেগুলি ছোট হয় এবং আমি দেখতে পাই যে তারা কোথায় বা বড় স্কিমিতে যোগদান করে / সংযুক্ত হয়।
আমি যদি আমি কী অর্জন করতে চাই তা ব্যাখ্যা করার চেষ্টা করতে চাই, যদিও আপনি যে খুব ব্যস্ত ব্যক্তি এবং অযথা আপনার মূল্যবান সময়টুকু নিতে চান তা আমি পছন্দ করি না।
চূড়ান্ত লক্ষ্যটি হ'ল আমি সোলার পিভি, উইন্ডমিলস এবং বায়ো ডিজেল জেনারেটর ব্যবহার করে একটি বহু-উত্স নবায়নযোগ্য শক্তি মাইক্রো গ্রিডের (উপাদানগুলি একত্রিত করতে) তৈরি করতে চাই।
প্রথম পদক্ষেপটি পিভি সোলার ইনভার্টার বর্ধন।
আমি আপনার 48 ভোল্ট খাঁটি সাইন ওয়েভ ইনভার্টার সার্কিটটি ধ্রুবক 2 কেডব্লিউ 230 ভি আউটপুট বজায় রাখতে সক্ষম ব্যবহার করতে চাই, এটি খুব কম সময়ের জন্য কমপক্ষে 3 বার এই আউটপুট সরবরাহ করতে সক্ষম হতে হবে।
সমান্তরালভাবে কাজ করতে এবং একটি এসি বাস বারের সাথে সংযুক্ত হওয়ার জন্য এই ইনভার্টার ইউনিটগুলির একটি সংখ্যা তৈরি করতে আমি যে কী পরিবর্তন করতে চাই তা অর্জন করতে চাই।
আমি প্রতিটি ইনভার্টারটি ফ্রিকোয়েন্সি, ভোল্টেজ এবং বর্তমান (লোড) জন্য এসি বাস বারকে স্বতন্ত্র এবং নিয়মিত নমুনা করতে চাই।
আমি এই ইনভার্টার্স স্লেভ ইউনিট বলব।
উল্টা মডিউল হিসাবে ধারণাটি হবে 'প্লাগ এবং প্লে'।
একবার এসি বাস বারের সাথে সংযুক্ত ইনভার্টারটি নিয়মিতভাবে এসি বাস বারের ফ্রিকোয়েন্সিটি নমুনা / পরিমাপ করে এবং 4040 আইসির ইনপুট চালানোর জন্য এই তথ্য ব্যবহার করে যেমন তার ঘড়ির আউটপুটটি অগ্রসর হতে পারে বা मंद করতে পারে যতক্ষণ না এটি ঠিক ফ্রিকোয়েন্সিটি ক্লোন করে দেয় until দু'টি তরঙ্গ ফর্ম একবারের জন্য সিএনক্রোনাইজ হয়ে গেলে এসি বাস বারটি একটি পরিচিতি বা রিলে বন্ধ করে দেবে যা ইনভার্ট আউটপুট পর্যায়ে এসি বাস বারের সাথে সংযুক্ত করে।
যদি বারের ফ্রিকোয়েন্সি বা ভোল্টেজ একটি পূর্ব নির্ধারিত সহনশীলতার বাইরে চলে যায় তবে বৈদ্যুতিন সংকেতের মেরু বদল মডিউলটি তার স্বর সুরক্ষার জন্য কার্যকরভাবে এসি বার থেকে ইনভার্টার আউটপুট পর্যায়ে সংযোগ বিচ্ছিন্ন করে আউটপুট পর্যায়ে রিলে বা যোগাযোগকারীকে খুলতে হবে।
অতিরিক্তভাবে একবার এসি বাস বারের সাথে সংযুক্ত হয়ে দাস ইউনিটগুলি ঘুমাতে যেত বা অন্তত ইনভারটারের আউটপুট পর্যায়ে ঘুমাতো যখন বারের বোঝা সমস্ত স্লেভ ইনভারটারের যোগফলের চেয়ে কম হয়। ভাবুন আপনি যদি এসি বাস বারের সাথে 3 টি স্লেভ ইনভার্টার সংযুক্ত থাকেন তবে বারের ভারটি কেবল 1.8kW এর পরে অন্য দুটি ক্রীতদাস ঘুমাতে যাবেন।
পারস্পরিক ক্রিয়াকলাপটিও সত্য হবে যে বারে লোড 3 কেডাব্লু বলতে ঝাঁপিয়ে পড়লে ঘুমন্ত ইনভার্টগুলির মধ্যে একটি তত্ক্ষণাত জাগ্রত হবে (ইতিমধ্যে সিঙ্কে থাকবে) অতিরিক্ত প্রয়োজনীয় শক্তি সরবরাহ করতে।
আমি কল্পনা করেছি যে প্রতিটি আউটপুট পর্যায়ে কিছু বড় ক্যাপাসিটারগুলি প্রয়োজনীয় শক্তি সরবরাহ করবে যখন বৈদ্যুতিন সংকেতের মেরু বদল করার খুব স্বল্প মুহূর্ত রয়েছে যখন এটি জেগে ওঠে।
প্রতিটি ইনভার্টারকে একে অপরের সাথে সরাসরি সংযুক্ত না করা বরং তারা স্বাধীনভাবে স্বায়ত্তশাসিত হওয়া বাঞ্ছনীয় (কেবলমাত্র আমার মতে) be
আমি মাইক্রো কন্ট্রোলারগুলি বা ইউনিটগুলির ত্রুটি বা ত্রুটি একে অপরকে বা সিস্টেমে 'ঠিকানার' অধিকারী ইউনিটগুলি এড়াতে চেষ্টা করতে চাই।
আমার মনের চোখে আমি ধারণা করি যে এসি বাস বারে প্রথম সংযুক্ত ডিভাইসটি খুব স্থিতিশীল রেফারেন্স ইনভার্টার হবে যা নিয়মিত সংযুক্ত থাকে।
এই রেফারেন্স ইনভার্টারটি অন্যান্য ক্রীতদাস ইউনিটগুলি তাদের নিজস্ব আউটপুট তৈরি করতে ব্যবহৃত ফ্রিকোয়েন্সি এবং ভোল্টেজ সরবরাহ করবে।
দুর্ভাগ্যক্রমে আমি আমার মাথা পেতে পারি না আপনি কীভাবে প্রতিক্রিয়ার লুপটিকে আটকাতে পারবেন যেখানে স্লেভ ইউনিটগুলি প্রতিটি রেফারেন্স ইউনিট হওয়ার সম্ভাব্যতা অর্জন করবে।
এই ইমেলের সুযোগ ছাড়িয়ে আমার কাছে কিছু ছোট জেনারেটর রয়েছে আমি যদি ডিসি সর্বাধিক আউটপুট ক্ষমতার চেয়ে বেশি হয়ে যায় এমন পরিস্থিতিতে বিদ্যুৎ সরবরাহের জন্য রেফারেন্স ইনভার্টারে সিঙ্ক্রোনাইজ করে এসি বাস বারের সাথে সংযোগ করতে চাই।
সামগ্রিক ভিত্তিটি হ'ল এসি বাস বারে উপস্থাপিত লোড নির্ধারণ করবে যে কতগুলি ইনভার্টার এবং শেষ পর্যন্ত কয়টি জেনারেটর স্বতঃস্ফূর্তভাবে চাহিদা মেটাতে সংযোগ বা সংযোগ বিচ্ছিন্ন করবে কারণ এটি আশাবাদী শক্তি সঞ্চয় করবে বা কমপক্ষে শক্তি অপচয় করবে না।
সিস্টেমটি সম্পূর্ণরূপে একাধিক মডিউল দ্বারা নির্মিত হচ্ছে তখন প্রসারণযোগ্য / সংকোচনের পাশাপাশি দৃust় / স্থিতিস্থাপক হতে পারে যাতে যদি কেউ বা সম্ভবত দুটি ইউনিট ব্যর্থ হয় তবে এটি হ্রাস ক্ষমতা হওয়ায় সমস্ত কাজ চালিয়ে যাবে।
আমি একটি ব্লক ডায়াগ্রাম সংযুক্ত করেছি এবং আপাতত ব্যাটারি চার্জিং বাদ দিয়েছি।
আমি এসি বাস থেকে ব্যাটারি ব্যাংক চার্জ করার জন্য এবং 48V ডিসি থেকে নীচে সংশোধন করার পরিকল্পনা করছি আমি জেনারেটর বা পুনর্নবীকরণযোগ্য শক্তি উত্স থেকে চার্জ করতে পারি, আমি বুঝতে পারি যে এটি সম্ভবত ডিসি এমপিপিটি ব্যবহার করার মতো দক্ষ নয় তবে আমি মনে করি আমি কি দক্ষতা হারাতে আমি নমনীয়তা অর্জন। আমি শহর বা ইউটিলিটি গ্রিড থেকে দীর্ঘ পথ বেঁচে আছি।
রেফারেন্সের জন্য 2kW এর এসি বাস বারে সর্বনিম্ন ধ্রুবক লোড থাকবে যদিও পিক লোড 30kW এর বেশি বাড়তে পারে।
আমার পরিকল্পনাটি সোলার পিভি প্যানেলগুলি সরবরাহ করার জন্য প্রথম 10 থেকে 15 কেডব্লুউব এবং দুটি 3 কেডব্লু (পিক) উইন্ডমিলগুলি বায়ুচক্রগুলি হ'ল ডিসি এবং 1000 1000 এএইচ 48 ভোল্টের ব্যাটারি ব্যাংককে বদ্ধ করা হয়েছে wild (যা আমি ব্যাটারির আয়ু নিশ্চিত করতে তার ক্ষমতার 30% ছাড়িয়ে নর্দমা / নিষ্কাশন এড়াতে চাই) অবশিষ্ট অপ্রত্যাশিত এবং খুব বিরতিহীন শক্তি চাহিদা আমার জেনারেটর দ্বারা সন্তুষ্ট হবে।
এই বিরল এবং মাঝে মাঝে বোঝা আমার কর্মশালা থেকে আসে।
আমি ভাবছিলাম যে আমার বায়ু সংকোচককারী এবং টেবিল করাতের মোটর এর মতো মোটামুটি যে কোনও প্ররোচক লোড স্টার্ট আপ স্রোতগুলি পরিচালনা করতে বা গ্রহণের জন্য ক্যাপাসিটার ব্যাংক তৈরি করা বুদ্ধিমানের কাজ হতে পারে।
তবে আরও ভাল / সস্তার উপায় না থাকলে আমি এই মুহূর্তে নিশ্চিত নই।
আপনার চিন্তাভাবনা এবং মন্তব্যগুলি প্রশংসিত হবে এবং মূল্যবান হবে আশা করি আপনার কাছে আমার কাছে ফিরে আসার সময় হবে।
আপনার সময় এবং মনোযোগের জন্য আগাম ধন্যবাদ।
আমার ব্ল্যাকবেরি® ওয়্যারলেস ডিভাইস থেকে দয়া করে ডেভিড প্রেরণ
আমার উত্তর
হাই ডেভিড,
আমি আপনার প্রয়োজনীয়তা পড়েছি এবং আশা করি এটি সঠিকভাবে বুঝতে পেরেছি।
৪ টি ইনভার্টারগুলির মধ্যে কেবল একটির নিজস্ব ফ্রিকোয়েন্সি জেনারেটর থাকবে, অন্যরা এই মূল বৈদ্যুতিন সংকেতের মেরু বদল আউটপুট থেকে ফ্রিকোয়েন্সি বের করে চলতে থাকবে, এবং এইভাবে সমস্ত একে অপরের সাথে এবং এই মাস্টার ইনভারটারের চশমাগুলির সাথে সুসংগত হবে।
আমি এটির নকশা করার চেষ্টা করব এবং আশা করি এটি প্রত্যাশার মতোই কাজ করে এবং আপনার উল্লিখিত চশমা অনুসারে, তবে বাস্তবায়নটি এমন একজন বিশেষজ্ঞের দ্বারা করা উচিত যারা ধারণাটি বুঝতে সক্ষম হন এবং এটি যেখানেই হোক না কেন পরিমার্জনে / পরিবর্তন করতে পারবেন প্রয়োজনীয় .... অন্যথায় এই যুক্তিসঙ্গত জটিল ডিজাইনের সাথে সাফল্য অর্জন করা অত্যন্ত কঠিন হয়ে উঠতে পারে।
আমি কেবলমাত্র বেসিক ধারণাটি এবং স্কিম্যাটিক উপস্থাপন করতে পারি .... আপনার পাশের ইঞ্জিনিয়ারদের দ্বারা বাকিটি করা দরকার।
এটি সম্পূর্ণ হতে আমার কিছুটা সময় লাগতে পারে, যেহেতু আমার কাছে ইতিমধ্যে কাতারে অনেকগুলি অনুরোধ রয়েছে ... আমি আপনাকে পোস্ট করার সাথে সাথে পুত্র হিসাবে জানিয়ে দেব
শুভেচ্ছা
ইমেল # 2
হাই স্বগতম,
আপনার খুব তাত্ক্ষণিক প্রতিক্রিয়ার জন্য আপনাকে অনেক ধন্যবাদ।
এটি আমার মনে ছিল এমনটি নয় তবে অবশ্যই একটি বিকল্পের প্রতিনিধিত্ব করে।
আমার ধারণা ছিল যে প্রতিটি ইউনিটে দুটি ফ্রিকোয়েন্সি পরিমাপ সাব সার্কিট থাকবে যা এসি বাস বারের ফ্রিকোয়েন্সি দেখে এবং এই ইউনিটটি ইনভার্টার সাইন ওয়েভ জেনারেটরের জন্য ক্লক নাড়ি তৈরি করতে ব্যবহৃত হয়।
অন্যান্য ফ্রিকোয়েন্সি পরিমাপ সাব সার্কিট ইনভার্টার সাইন ওয়েভ জেনারেটর থেকে আউটপুট তাকান।
সাইন ওয়েভ জেনারেটরের আউটপুটটি এসি বারের সাথে সাইন ওয়েভের সাথে সঠিকভাবে মিল না হওয়া পর্যন্ত সম্ভবত একটি ওপ্যাম্প অ্যারে ব্যবহার করে একটি ওপ্যাম্প অ্যারে ব্যবহার করে যে ইনভার্টার সাইন ওয়েভ জেনারেটর ক্লক পালসটি ফিরিয়ে আনবে বা ক্লক সিগন্যালকে ফিরিয়ে আনবে ।
একবার বৈদ্যুতিন সংকেতের মেরু বদলের আউটপুট পর্যায়টির ফ্রিকোয়েন্সিটি এসি বাস বারের ফ্রিকোয়েন্সিটির সাথে মিলে গেলে একটি এসএসআর আসবে যা ইনভার্টারের আউটপুট পর্যায়ে এসি বারের সাথে সংযোগ স্থাপন করে প্রায় জিরো ক্রস ওভার পয়েন্টে পৌঁছায়।
এইভাবে যে কোনও একটি বৈদ্যুতিন সংকেতের মেরু বদল মডিউল ব্যর্থ হতে পারে এবং সিস্টেমের কাজ চালিয়ে যাবে। মাস্টার ইনভারটারের উদ্দেশ্যটি ছিল যে সমস্ত ইনভার্টার মডিউলগুলি এটি কখনই ঘুমায় না এবং প্রাথমিক এসি বার ফ্রিকোয়েন্সি সরবরাহ করে। তবে যদি এটি ব্যর্থ হয় তবে অন্য ইউনিটগুলি যতক্ষণ না 'অনলাইন' থাকবে ততক্ষণ প্রভাবিত হবে না
দাস ইউনিটগুলি লোড পরিবর্তনের সাথে সাথে বন্ধ করা বা শুরু করা উচিত।
আপনার পর্যবেক্ষণটি সঠিক ছিল আমি কোনও 'ইলেকট্রনিক্স' মানুষ নই আমি একজন যান্ত্রিক এবং বৈদ্যুতিক প্রকৌশলী ch
এই প্রকল্পের অগ্রগতি হিসাবে, এবং আরও স্পষ্ট হয়ে উঠতে শুরু করে আপনি কি কোনও অর্থ উপহার গ্রহণের জন্য ঝাঁকুনি / খোলা থাকবেন? আমার কাছে খুব বেশি নেই তবে আমি আপনার ওয়েবসাইটের হোস্টিংয়ের ব্যয়কে সাপোর্ট করতে পেপালের মাধ্যমে কিছু অর্থ উপহার দিতে পারলাম।
আবার আপনাকে ধন্যবাদ.
আমি আপনার কাছ থেকে শ্রবণ করার জন্য উন্মুখ.
নমস্তে
ডেভিড
আমার উত্তর
ধন্যবাদ ডেভিড,
মূলত আপনি চান যে ইনভার্টারগুলি ফ্রিকোয়েন্সি এবং পর্বের দিক থেকে একে অপরের সাথে সুসংগত হয়, এবং প্রত্যেকেরই মাস্টার ইনভার্টার হয়ে ওঠার ক্ষমতা গ্রহণের ক্ষমতা রয়েছে, যদি কোনও কারণে কোনও কারণে পূর্ববর্তীটি ব্যর্থ হয়। ঠিক?
আমি জটিল আইসি বা কনফিগারেশন নিয়োগ না করে যা কিছু জ্ঞান এবং কিছু সাধারণ জ্ঞান আছে তার সাথে এটি ঠিক করার চেষ্টা করব।
উষ্ণতম শুভেচ্ছা
ইমেল # 3
হাই সোয়াগ,
এটি হ'ল বাদামের শেলের মধ্যে, একটি অতিরিক্ত প্রয়োজনীয়তা বিবেচনায় নিয়ে।
লোডটি হ্রাস পাওয়ার সাথে সাথে ইনভার্টারগুলি একটি ইকো বা স্ট্যান্ডবাই মোডে চলে যায় এবং লোডটি বাড়তে থাকে বা বৃদ্ধি পায় তারা চাহিদা পূরণে জেগে ওঠে।
আপনি যে পদ্ধতির সাথে যাচ্ছেন তা আমি পছন্দ করি ...
আপনাকে অনেক ধন্যবাদ আমার প্রতি আপনার বিবেচনা খুব প্রশংসা করা হয়।
নমস্তে
বিনম্র শ্রদ্ধা
ডেভিড
নকশা
মিঃ ডেভিডের অনুরোধ অনুসারে, প্রস্তাবিত 4 কেভিএ স্ট্যাকএবল পাওয়ার ইনভার্টার সার্কিটগুলি 4 টি পৃথক বৈদ্যুতিন সংকেতের মেরু বদল সার্কিটগুলির আকারে থাকা দরকার যা সংযুক্ত হয়ে স্ব-নিয়ন্ত্রিত শক্তিটির সঠিক পরিমাণ সরবরাহের জন্য একে অপরের সাথে যথাযথভাবে সিঙ্ক করা যায় এই লোডগুলি কীভাবে চালু এবং বন্ধ হয় তার উপর নির্ভর করে লোড
হালনাগাদ:
কিছু চিন্তাভাবনার পরে আমি বুঝতে পেরেছিলাম যে নকশাটি আসলে খুব জটিল হওয়ার দরকার নেই, বরং নীচের চিত্রের মতো একটি সাধারণ ধারণা ব্যবহার করে প্রয়োগ করা যেতে পারে।

কেবলমাত্র আইসি 4017 এর সাথে সম্পর্কিত ডায়োড, ট্রানজিস্টর এবং ট্রান্সফর্মারটি প্রয়োজনীয় সংখ্যক বৈদ্যুতিন সংকেতের জন্য পুনরাবৃত্তি করতে হবে।
দোলকটি একক টুকরো হবে এবং আইসি 4017 এর পিন 14 এর সাথে তার পিন 3 সংহত করে সমস্ত ইনভার্টারগুলির সাথে ভাগ করা যায়।
প্রতিক্রিয়া সার্কিটটি পৃথক বৈদ্যুতিন সংকেতের মেরু বদলকারীদের জন্য অবশ্যই যথাযথভাবে সামঞ্জস্য করা উচিত, যাতে সমস্ত ইনভার্টারগুলির জন্য কাট অফ রেঞ্জটি ঠিক মিলে যায়।
উপরের দিক থেকে অনেক সহজ সংস্করণ ইতিমধ্যে আপডেট করা হওয়ায় নিম্নলিখিত ডিজাইনগুলি এবং ব্যাখ্যাগুলি উপেক্ষা করা যেতে পারে
ইনভার্টারগুলি সিঙ্ক্রোনাইজ করা হচ্ছে
এখানে মূল চ্যালেঞ্জ হ'ল যতক্ষণ না মাস্টার ইনভার্টার চালু থাকে ততক্ষণ প্রতিটি দাস ইনভারটারের সাথে সিঙ্কে সক্ষম হয় এবং কোনও ইভেন্টে (সম্ভাবনা না থাকলেও) মাস্টার ইনভার্টার ব্যর্থ হয় বা কাজ বন্ধ করে দেয়, পরবর্তী বৈদ্যুতিন সংকেতের মেরু বদল করে চার্জ করে এবং নিজেই মাস্টার ইনভার্টার হয়ে যায়।
এবং যদি দ্বিতীয় ইনভেটারটিও ব্যর্থ হয় তবে তৃতীয় ইনভার্টার কমান্ডটি গ্রহণ করে এবং মাস্টার ইনভারটারের ভূমিকা পালন করে।
আসলে, বৈদ্যুতিন সংকেতের মেরু বদল সিঙ্ক্রোনাইজ করা কঠিন নয় not আমরা জানি এটি এসজি 3525, টিএল 494 ইত্যাদির মতো আইসি ব্যবহার করে সহজেই করা যায় তবে যাইহোক, ডিজাইনের কঠিন অংশটি নিশ্চিত করা হয় যে যদি মাস্টার ইনভার্টার ব্যর্থ হয় তবে অন্য ইনভার্টারগুলির মধ্যে একটি দ্রুত মাস্টার হয়ে উঠতে সক্ষম হয়।
এবং ফ্রিকোয়েন্সি, ফেজ এবং পিডব্লিউএম এমনকি এমনকি একটি বিভক্ত দ্বিতীয় হিসাবে এবং একটি মসৃণ রূপান্তর সহ নিয়ন্ত্রণ না হারিয়ে এটিকে কার্যকর করা দরকার।
আমি জানি যে আরও অনেক ভাল ধারণা থাকতে পারে, উল্লিখিত মানদণ্ড পূরণের জন্য সর্বাধিক মৌলিক নকশাটি নিম্নলিখিত চিত্রটিতে দেখানো হয়েছে:

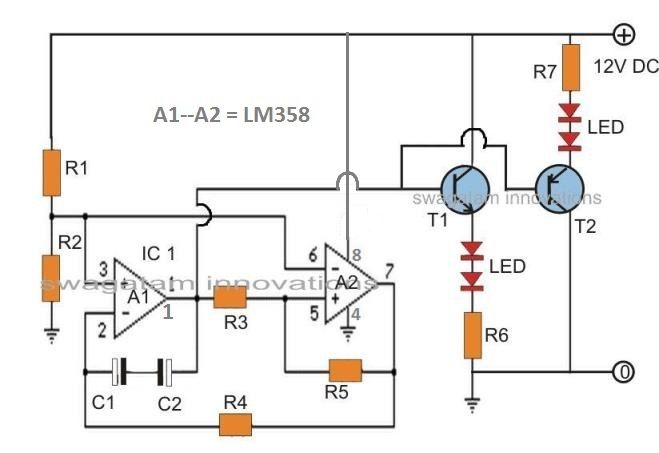
উপরের চিত্রটিতে আমরা বেশ কয়েকটি অভিন্ন ধাপ দেখতে পাচ্ছি, যেখানে উপরের ইনভার্টার # 1 মাস্টার ইনভার্টার গঠন করে যখন নীচের বৈদ্যুতিন সংকেতের # 2 গোলাম।
বৈদ্যুতিন সংকেতের মেরু বদল # 3 এবং বৈদ্যুতিন সংকেতের মেরু বদল # 4 আকারে আরও বিস্তৃত এই ইনভার্টারগুলিকে তাদের indivudual optocoupler পর্যায়ে একীভূত করে একই অভিন্ন ফ্যাশনে সেট আপ করা হবে বলে মনে করা হয়, তবে ওপ্যাম্প স্টেজটি পুনরাবৃত্তি করার প্রয়োজন নেই।
নকশাটি মূলত একটি আইসি 555 ভিত্তিক দোলক এবং একটি আইসি 4013 ফ্লিপ ফ্লপ সার্কিট নিয়ে গঠিত। আইসি 555 100Hz বা 120Hz হারে ঘড়ির ফ্রিকোয়েন্সি তৈরি করতে কঠোর হয় যা আইসি 4013 এর ক্লক ইনপুটকে খাওয়ানো হয়, যা পরে এটি পিন # 1 জুড়ে পর্যায়ক্রমে তার আউটপুটগুলি লিনিকের সাথে উল্টিয়ে দিয়ে প্রয়োজনীয় 50Hz বা 60Hz এ রূপান্তর করে এবং পিন # 2।
এই বিকল্পগুলি আউটপুটগুলি তখন পাওয়ার ডিভাইসগুলি সক্রিয় করতে এবং ট্রান্সফর্মারটি উদ্দেশ্যে 220 ভি বা 120 ভি এসি তৈরির জন্য ব্যবহৃত হয়।
এখন যেমন আগে আলোচনা হয়েছে এখানে গুরুত্বপূর্ণ সমস্যাটি হ'ল দুটি ইনভার্টরকে সিঙ্ক্রোনাইজ করা যাতে এগুলি ফ্রিকোয়েন্সি, ফেজ এবং পিডাব্লুএম-এর ক্ষেত্রে যথাযথভাবে সিঙ্কে চালাতে সক্ষম হয়।
প্রাথমিকভাবে সমস্ত জড়িত মডিউলগুলি (স্ট্যাকেবল বৈদ্যুতিন সংকেতের মেরু বদল সার্কিট) পৃথকভাবে যথাযথ অভিন্ন উপাদানগুলির সাথে সামঞ্জস্য করা হয় যাতে তাদের আচরণ একে অপরের সাথে সমান হয়।
তবে সুনির্দিষ্টভাবে মিলে যাওয়া বৈশিষ্ট্যের সাথেও, ইনভার্টারগুলি সিঙ্কে পুরোপুরি চলার আশা করা যায় না যদি এগুলি কিছু অনন্য পদ্ধতিতে আবদ্ধ না হয়।
এটি প্রকৃতপক্ষে উপরের নকশায় বর্ণিত একটি opamp / optocoupler পর্যায়ে 'স্লেভ' ইনভার্টারগুলিকে একীকরণের মাধ্যমে করা হয়েছে।
প্রাথমিকভাবে, মাস্টার ইনভার্টার # 1 চালু করা হয়, যা ওপাম্প 741 পর্যায়টি চালিত হতে এবং আউটপুট ভোল্টেজের ফ্রিকোয়েন্সি এবং ফেজ ট্র্যাকিংয়ের সূচনা করে।
একবার এটি শুরু করা হলে, পরবর্তী ইনভার্টারগুলি মেইন লাইনে শক্তি যোগ করার জন্য সমস্তটি চালু করা হয়।
যেমন দেখা যায় যে ওপ্যাম্প আউটপুটটি সমস্ত দাস ইনভার্টারগুলির একটি অপ্টো কাপলারের মাধ্যমে টাইমিং ক্যাপাসিটরের সাথে সংযুক্ত থাকে যা স্লেভ ইনভার্টারগুলিকে মাস্টার ইনভারটারের ফ্রিকোয়েন্সি এবং ফেজ কোণ অনুসরণ করতে বাধ্য করে।
তবে মজার বিষয়টি হ'ল তাত্ক্ষণিক পর্যায়ে এবং ফ্রিকোয়েন্সি তথ্যের সাথে ওপ্যাম্পের ল্যাচিং ফ্যাক্টর।
এটি ঘটেছে যেহেতু সমস্ত ইনভার্টারগুলি এখন মাস্টার ইনভার্টার থেকে নির্দিষ্ট ফ্রিকোয়েন্সি এবং পর্যায়ে সরবরাহ করা এবং চলছে, যা বোঝাচ্ছে যদি মাস্টার ইনভার্টার সহ কোনও ইনভার্টার ব্যর্থ হয় তবে ওপাম্পটি তাত্ক্ষণিক ফ্রিকোয়েন্সি / দ্রুত ইনজেক্ট করতে সক্ষম হয় পর্যায়ের তথ্য এবং বিদ্যমান বৈদ্যুতিন সংকেতের মেরু বদলগুলি এই নির্দিষ্টকরণগুলির সাথে চালিত করতে বাধ্য করে এবং ইনভার্টারগুলি পরিবর্তণগুলি বিজোড়হীন এবং স্ব-অনুকূল করে তুলতে ওপ্যাম্প পর্যায়ে ফিডব্যাকগুলি বজায় রাখতে সক্ষম হয়।
সুতরাং আশা করা যায় যে সমস্ত প্রস্তাবিত স্ট্যাকএবল ইনভার্টারগুলিকে উপলব্ধ মেইন স্পেসিফিকেশনটির একটি লাইভ ট্র্যাকিংয়ের মাধ্যমে পুরোপুরি সিঙ্ক্রোনাইজ করার জন্য প্রথম চ্যালেঞ্জটি ওপাম্প স্টেজ গ্রহণ করবে।
নিবন্ধের পরবর্তী অংশে আমরা এটি শিখব সিঙ্ক্রোনাইজ করা পিডাব্লুএম সাইনওয়েভ স্টেজ যা উপরোক্ত আলোচিত ডিজাইনের পরবর্তী গুরুত্বপূর্ণ বৈশিষ্ট্য।
এই নিবন্ধের উপরের অংশে আমরা 4kva সিঙ্ক্রোনাইজড স্ট্যাকেবল ইনভার্টার সার্কিটের মূল বিভাগটি শিখলাম যা ডিজাইনের সিঙ্ক্রোনাইজেশন বিশদটি ব্যাখ্যা করেছে। এই নিবন্ধে আমরা অধ্যয়ন করি কীভাবে ডিজাইনটিকে সাইনওয়েভ সমতুল্য করা যায় এবং জড়িত ইনভার্টারগুলির জুড়ে পিডব্লিউএমগুলির সঠিক সমন্বয় নিশ্চিত করা যায়।
বৈদ্যুতিন সংকেতের মেরু বদল জুড়ে সাইন ওয়েভ PWM সিঙ্ক্রোনাইজ করা
নিম্নলিখিত চিত্রটিতে দেখানো হয়েছে, একটি সাধারণ আরএমএস মিলিত পিডব্লিউএম সমতুল্য সাইনওয়েভ ওয়েভফর্ম জেনারেটর একটি আইসি 555 এবং আইসি 4060 ব্যবহার করে তৈরি করা যেতে পারে।
এই নকশাটি ইনভার্টারগুলিকে তাদের আউটপুটগুলিতে এবং সংযুক্ত মেইন লাইন জুড়ে সাইনওয়েভ সমতুল্য তরঙ্গরূপ তৈরি করতে সক্ষম করার জন্য ব্যবহার করা যেতে পারে।
এই প্রতিটি পিডাব্লুএম প্রসেসরের প্রতিটি স্ট্যাকযোগ্য ইনভার্টার মডিউলগুলির জন্য পৃথকভাবে প্রয়োজন হবে।
হালনাগাদ: দেখে মনে হচ্ছে যে সমস্ত ট্রানজিস্টর ঘাঁটি কেটে ফেলার জন্য একক পিডাব্লুএম প্রসেসর সাধারণভাবে ব্যবহার করা যেতে পারে, তবে প্রতিটি এমজে ৩০০১ বেস পৃথক 1N4148 ডায়োডের মাধ্যমে নির্দিষ্ট বিসি 547৪ সংগ্রাহকের সাথে সংযুক্ত থাকে। এটি একটি বিশাল পরিমাণে নকশাকে সহজতর করে।

উপরের পিডব্লিউএম জেনারেটর সার্কিটের সাথে জড়িত বিভিন্ন স্তরগুলি নিম্নলিখিত পয়েন্টটির সাহায্যে বোঝা যাবে:
আইসি 555 কে পিডাব্লুএম জেনারেটর হিসাবে ব্যবহার করছে
আইসি 555 বেসিক পিডাব্লুএম জেনারেটর সার্কিট হিসাবে কনফিগার করা হয়েছে। কাঙ্ক্ষিত আরএমএসে সামঞ্জস্যযোগ্য পিডব্লিউএম সমতুল্য ডাল তৈরি করতে সক্ষম হওয়ার জন্য আইসি এর পিন 7 এ দ্রুত ত্রিভুজ তরঙ্গ এবং তার পিন 5 এ একটি রেফারেন্স সম্ভাব্য যা তার আউটপুট পিন # 3 এ PWM স্তর নির্ধারণ করে
আইসি 4060 ত্রিভুজ ওয়েভ জেনারেটর হিসাবে ব্যবহার করা হচ্ছে
ত্রিভুজ তরঙ্গ উত্পন্ন করার জন্য, আইসি 555 এর পিন # 2 এ বর্গাকার তরঙ্গ প্রয়োজন, যা আইসি 4060 অসিলেটর চিপ থেকে নেওয়া হয়েছিল।
আইসি 4060 পিডব্লিউএম এর ফ্রিকোয়েন্সি বা এসি অর্ধ চক্রের প্রতিটি 'স্তম্ভের' সংখ্যা নির্ধারণ করে।
আইসি 4060 মূলত ইনভার্টার আউটপুট থেকে নমুনা কম ফ্রিকোয়েন্সি সামগ্রীকে এর পিন # 7 থেকে তুলনামূলকভাবে উচ্চ ফ্রিকোয়েন্সিতে গুণ করার জন্য নিযুক্ত করা হয়। নমুনার ফ্রিকোয়েন্সিটি মূলত নিশ্চিত করে যে পিডাব্লুএম কাটা সমস্ত ইনভেটারার মডিউলগুলির জন্য সমান এবং সিঙ্ক্রোনাইজড। আইসি 4060 অন্তর্ভুক্ত করার প্রধান কারণ এটি অন্যথায় অন্য কোনও আইসি 555 এর পরিবর্তে সহজেই কাজটি সম্পন্ন করতে পারে।
আইসি 555 এর পিন # 5 এ রেফারেন্স সম্ভাবনা সার্কিটের চরম বাম দিকে প্রদর্শিত একটি ওপ্যাম্প ভোল্টেজ অনুগামী থেকে অর্জিত হয়।
নামটি থেকে বোঝা যায় যে এই ওপাম্পটি তার পিন # 3 এ ভোল্টেজের একই মাত্রা সরবরাহ করে যা এটি তার পিন # 3 এ প্রদর্শিত হবে .... তবে পিন # 6 এর পিনের নকলটি খুব ভালভাবে বাফার হয়েছে, এবং তাই এর চেয়ে সমৃদ্ধ পিন 3 গুণমান এবং এটি নকশায় এই পর্যায়টি অন্তর্ভুক্ত করার সঠিক কারণ।
এই আইসির পিন 3 এ যুক্ত 10 কে প্রিসেটটি আরএমএস স্তরটি সামঞ্জস্য করতে ব্যবহৃত হয় যা শেষ পর্যন্ত আইসি 555 আউটপুট পিডাব্লুএমএসকে পছন্দসই আরএমএস স্তরে সুর করে।
এই আরএমএসটি তখন পাওয়ার ডিভাইসগুলির ঘাঁটিতে প্রয়োগ করা হয় যাতে নির্দিষ্ট পিডব্লিউএম আরএমএস স্তরে তাদের কাজ করতে বাধ্য করা হয়, যার ফলে আউটপুট এসি একটি সঠিক আরএমএস স্তরের মাধ্যমে খাঁটি সাইনওয়েভের মতো অ্যাট্রিবিউট অর্জন করে। সমস্ত ট্রান্সফর্মারগুলির আউটপুট উইন্ডিং জুড়ে একটি এলসি ফিল্টার নিযুক্ত করে এটি আরও বাড়ানো যেতে পারে।
এই 4 কেভিএ স্ট্যাকএবল সিঙ্ক্রোনাইজ ইনভার্টার সার্কিটের পরবর্তী এবং চূড়ান্ত অংশটি বৈদ্যুতিন লোড স্যুইচিংয়ের সাথে সামঞ্জস্য করে আউটপুট পাওয়ার মেইন লাইন জুড়ে সঠিক পরিমাণ ওয়াটেজ সরবরাহ করতে এবং বজায় রাখতে সক্ষম করার জন্য স্বয়ংক্রিয় লোড সংশোধন বৈশিষ্ট্যটি বিশদ দেয়।
আমরা এখন পর্যন্ত প্রস্তাবিত সিঙ্ক্রোনাইজড 4 কেভিএ স্ট্যাকেবল ইনভার্টার সার্কিটের জন্য দুটি মূল প্রয়োজনীয়তা coveredেকে রেখেছি, যার মধ্যে ইনভার্টারগুলি জুড়ে ফ্রিকোয়েন্সি, ফেজ এবং পিডাব্লুএমের সিঙ্ক্রোনাইজেশন অন্তর্ভুক্ত রয়েছে যাতে উপরের প্যারামিটারগুলির সাথে কোনও ইনভার্টারের ব্যর্থতা বাকী কোনও প্রভাব ফেলতে পারে না includes ।
স্বয়ংক্রিয় লোড সংশোধন স্টেজ
এই নিবন্ধে আমরা স্বয়ংক্রিয় লোড সংশোধন বৈশিষ্ট্যটি বের করার চেষ্টা করব যা আউটপুট মেইন লাইন জুড়ে বিবিধ লোড অবস্থার প্রতিক্রিয়া অনুসারে যথাক্রমে ইনভার্টারগুলি চালু বা বন্ধ করতে সক্ষম করতে পারে OF
LM324 আইসি ব্যবহার করে একটি সাধারণ চতুষ্পদ তুলনাকারী নিম্নলিখিত ডায়াগ্রামে নির্দেশিত হিসাবে একটি স্বয়ংক্রিয় ক্রমবর্ধমান লোড সংশোধন বাস্তবায়নের জন্য ব্যবহার করা যেতে পারে:

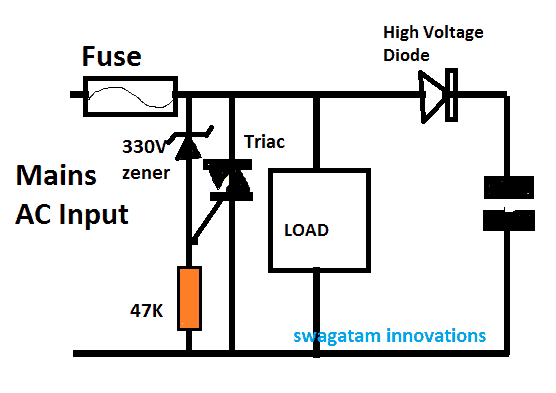
উপরের চিত্রটিতে আমরা আইসি এলএম 324 থেকে চারটি পৃথক তুলনাকারী হিসাবে পৃথক প্রেজেটের সাথে অনড়িত ইনপুটগুলির সাথে পৃথক পৃথক তুলনাকারী হিসাবে কনফিগার করা চারটি ওপ্যাম্প দেখতে পাচ্ছি, যখন তাদের ইনভার্টিং ইনপুটগুলি একটি নির্দিষ্ট জেনার ভোল্টেজের সাথে উল্লেখ করা হয়।
প্রাসঙ্গিক প্রিসেটগুলি কেবল এমনভাবে সামঞ্জস্য করা হয় যে মেইন ভোল্টেজটি পূর্বনির্ধারিত প্রান্তিকের ওপরে যাওয়ার সাথে সাথেই ওপ্যাম্পগুলি একটি অনুক্রমের মধ্যে উচ্চ আউটপুট উত্পাদন করে ..... এবং বিপরীতভাবে।
যখন এটি ঘটে তখন সম্পর্কিত ট্রানজিস্টরগুলি ওপ্যাম্প অ্যাক্টিভেশন অনুসারে স্যুইচ করে।
সম্পর্কিত বিজেটিগুলির সংগ্রাহকগণ পিডাব্লুএম নিয়ন্ত্রণকারী পর্যায়ে নিযুক্ত ভোল্টেজ ফলোয়ার ওপাম্প আইসি 741 এর পিন # 3 এর সাথে সংযুক্ত আছেন এবং এটি ওপ্যাম্প আউটপুট কম বা শূন্যে যেতে বাধ্য করে, যার ফলে শূন্য ভোল্টেজ দেখা দেয় পিডব্লিউএম আইসি 555 এর পিন # 5 এ (পার্ট 2 তে আলোচনা করা হয়েছে)।
আইসি 555 এর পিন # 5 দিয়ে এই শূন্য যুক্তি প্রয়োগ করা হয়, পিডাব্লুএমএমকে সংকীর্ণ বা ন্যূনতম মান হতে বাধ্য করে, যার ফলে সেই নির্দিষ্ট ইনভার্টারের আউটপুট প্রায় বন্ধ হয়ে যায়।
উপরের ক্রিয়াগুলি আউটপুটটিকে পূর্বের স্বাভাবিক অবস্থায় স্থিতিশীল করার চেষ্টা করে যা পুনরায় পিডব্লিউএমকে আরও বিস্তৃত করতে বাধ্য করে এবং এই টগ-অফ-ওয়ার বা অপ্যাম্পস সিনটিউনসের ধারাবাহিকভাবে স্যুইচিং অবিচ্ছিন্নভাবে আউটপুটটিকে যথাসম্ভব স্থিতিশীল রাখে, প্রতিক্রিয়া হিসাবে সংযুক্ত লোডের প্রকরণ।
প্রস্তাবিত 4kva স্ট্যাকেবল বৈদ্যুতিন সংকেতের মেরু বদল সার্কিটের মধ্যে বাস্তবায়িত এই স্বয়ংক্রিয় লোড সংশোধনটি নিবন্ধের অংশ 1 এ ব্যবহারকারী দ্বারা অনুরোধ করা সমস্ত বৈশিষ্ট্যগুলি দিয়ে প্রায় নকশা সম্পূর্ণ করে তোলে।
পূর্ববর্তী: এই স্লিপওয়াক সতর্কতা করুন - স্লিপওয়াকিং বিপদ থেকে নিজেকে রক্ষা করুন পরবর্তী: আইসি 555 পিনআউটস, অস্টেবল, মনস্টেবল, বিস্টেবল সার্কিটগুলি সূত্রগুলির সাথে অন্বেষণ করা