একটি বৈদ্যুতিক মেশিন যে বৈদ্যুতিক শক্তি রূপান্তর যান্ত্রিক শক্তিতে বৈদ্যুতিক মোটর বলে। প্রথম এবং সর্বাগ্রে বৈদ্যুতিক মোটর হ'ল 1740 এর দশকে স্কটিশ সন্ন্যাসী অ্যান্ড্রু গর্ডন তৈরি একটি সাধারণ ইলেক্ট্রোস্ট্যাটিক ডিভাইস। তবে 1821 সালে মাইকেল ফ্যারাডে বৈদ্যুতিক শক্তিকে যান্ত্রিক শক্তিতে রূপান্তরিত করেছিলেন।
বৈদ্যুতিক মোটর প্রাথমিকভাবে দুটি বিভাগে শ্রেণিবদ্ধ করা হয়: এসি মোটর এবং ডিসি মোটর । আবার, প্রতিটি বিভাগ বিভিন্ন ধরণের মধ্যে বিভক্ত হয়। অনেকগুলি বোঝা যেমন মিক্সার, পেষকদন্ত, পাখা ইত্যাদি, বেশিরভাগ ঘন ঘন ব্যবহৃত হোম অ্যাপ্লায়েন্সেসে আমরা বিভিন্ন ধরণের মোটর দেখতে পাই এবং এগুলি মোটরগুলির গতি নিয়ন্ত্রণের বিধানের সাথে বিভিন্ন গতিতে পরিচালনা করা যায়। এই নিবন্ধে, আমরা ডিসি মোটরগুলির একটি প্রধান ধরণের সম্পর্কে আলোচনা করতে যাচ্ছি, যথা স্টিপার মোটর এবং এর নিয়ন্ত্রণ মাইক্রোকন্ট্রোলার ব্যবহার করে।
Stepper মোটর
একটি সিঙ্ক্রোনাস এবং brushless ডিসি মোটর যা বৈদ্যুতিক ডালগুলিকে যান্ত্রিক গতিবিধিতে রূপান্তরিত করে এবং এইভাবে, একটি পূর্ণ ঘূর্ণন সম্পন্ন করার জন্য প্রতিটি ধাপের মধ্যে একটি নির্দিষ্ট কোণ দিয়ে ধাপে ধাপে ধাপে স্টেপার মোটর বলে। স্টেপার মোটরের আবর্তনের ধাপগুলির মধ্যবর্তী কোণটিকে মোটরের স্টিপার কোণ হিসাবে আখ্যায়িত করা হয়।

Stepper মোটর
স্টিপার মোটরগুলি তাদের বাতানুসারে দুটি প্রকারে শ্রেণিবদ্ধ করা হয়: ইউনিপোলার স্টিপার মোটরস এবং বাইপোলার স্টিপার মোটর। বাইপোলার স্টিপার মোটরের তুলনায় ইউনিপোলার স্টিপার মোটরটি প্রায়শই অনেকগুলি অ্যাপ্লিকেশনগুলিতে ব্যবহৃত হয় operation তবে বিভিন্ন ধরণের স্টেপার মোটর যেমন স্থায়ী চৌম্বক স্টেপার মোটর, ভেরিয়েবল অনিচ্ছা স্টিপার মোটর এবং হাইব্রিড স্টিপার মোটর রয়েছে।
স্টিপার মোটর নিয়ন্ত্রণ
স্টেপার মোটরটি বিভিন্ন কৌশল দ্বারা নিয়ন্ত্রিত হতে পারে তবে আমরা এখানে স্টেপার মোটর নিয়ন্ত্রণ নিয়ে আলোচনা করছি আতমেগা মাইক্রোকন্ট্রোলার । 89C51 হ'ল একটি মাইক্রোকন্ট্রোলার 8051 মাইক্রোকন্ট্রোলার পরিবার ।

স্টেপার মোটর কন্ট্রোলের ব্লক ডায়াগ্রাম
8051 মাইক্রোকন্ট্রোলার ব্যবহার করে স্টিপার মোটর কন্ট্রোলের ব্লক ডায়াগ্রামটি চিত্রটিতে দেখানো হয়েছে বিদ্যুৎ সরবরাহ , মাইক্রোকন্ট্রোলার, স্টিপার মোটর এবং নিয়ন্ত্রণ সুইচ ব্লক।
স্টেপার মোটর কন্ট্রোল সার্কিট ডিজাইনের 2 পদ্ধতি
স্টিপার মোটর নিয়ামক ডিজাইন করা হয়েছে 8051 মাইক্রোকন্ট্রোলার ব্যবহার করে এবং স্টিপার মোটরের গতি নিয়ন্ত্রণ করার জন্য স্যুইচিং সার্কিট। নিয়ন্ত্রণ সুইচ সার্কিট ব্যবহার করে ডিজাইন করা যেতে পারে ট্রানজিস্টর সুইচ বা ট্রানজিস্টারের জায়গায় স্টিপার মোটর কন্ট্রোলার আইসি যেমন ইউএলএন ২০০৩ ব্যবহার করে।
1. স্টিপার মোটর কন্ট্রোলার আইসি ব্যবহার করে কন্ট্রোল সার্কিট
ইউনিপোলার স্টিপার মোটরটি ক্রমানুসারে স্ট্যাটার কয়েলগুলিকে শক্ত করে ঘোরানো যেতে পারে। মোটর কয়েল বা সীসা জুড়ে প্রয়োগ করা এই ভোল্টেজ সংকেতের ক্রম মোটর চালানোর জন্য যথেষ্ট এবং তাই স্ট্যাটারের কয়েলে স্রোতের দিকটি নিয়ন্ত্রণ করার জন্য কোনও ড্রাইভার সার্কিটের প্রয়োজন হয় না।

আইসি ব্যবহার করে স্টিপার মোটর কন্ট্রোল
দ্বি-পর্বের স্টেপার মোটরটি কয়েলগুলির সাথে সংযুক্ত চারটি প্রান্তযুক্ত তারের এবং দুটি প্রান্তের সাথে সংযুক্ত দুটি সাধারণ তারের সাথে দুটি ধাপ তৈরি করে। দুটি পর্বের সাধারণ পয়েন্ট এবং শেষ পয়েন্টগুলি যথাক্রমে স্থল বা ভিসি এবং মাইক্রোকন্ট্রোলার পিনের সাথে সংযুক্ত থাকে। মোটরটি ঘোরানোর জন্য, দুটি ধাপের শেষ পয়েন্টগুলি জোরদার করতে হবে। প্রাথমিকভাবে ফেজ 1 এর প্রথম প্রান্ত বিন্দুতে একটি ভোল্টেজ প্রয়োগ করা হয়, এবং আরও ভোল্টেজটি ফেজ 2 এর প্রথম প্রান্ত বিন্দুতে প্রয়োগ করা হয়, এবং আরও কিছু।
স্টেপার মোটরটি বিভিন্ন মোডে যেমন ওয়েভ ড্রাইভ স্টেপিং মোড, ফুল ড্রাইভ স্টেপিং মোড এবং হাফ ড্রাইভ স্টেপিং মোডে চালিত হতে পারে।
ওয়েভ ড্রাইভ স্টেপিং মোড
উপরের ক্রমটি পুনরাবৃত্তি করে মোটরটি শেষ পয়েন্টগুলির নির্বাচনের উপর ভিত্তি করে একটি ঘড়ির কাঁটার দিকে বা অ্যান্টিক্লোকের দিক দিয়ে ওয়েভ-ড্রাইভ-স্টেপিং মোডে ঘোরানো যেতে পারে। নীচের টেবিলটি ওয়েভ-ড্রাইভ-স্টেপিং মোডের জন্য সিগন্যাল ফেজ ক্রম দেখায়।


ওয়েভ ড্রাইভ স্টেপিং মোড
সম্পূর্ণ ড্রাইভ পদক্ষেপ মোড
বিভিন্ন পর্যায়ের দুটি শেষ পয়েন্টকে একযোগে একযোগে পূর্ণ-ড্রাইভ-স্টেপিং মোড অর্জন করে। টেবিলটি পূর্ণ-ড্রাইভ-পদক্ষেপ মোডের জন্য সিগন্যাল ফেজ ক্রম দেখায়।


সম্পূর্ণ ড্রাইভ পদক্ষেপ মোড
হাফ ড্রাইভ স্টেপিং মোড
তরঙ্গ এবং ফুল-ড্রাইভ-স্টেপিং মোডগুলির ধাপগুলির সংমিশ্রণ একটি অর্ধ-ড্রাইভ-স্টেপিং মোড অর্জন করে। সুতরাং, এই মোডে, স্টেপিং কোণটি অর্ধে ভাগ করা হয়। সারণীটি অর্ধ-ড্রাইভ-স্টেপিং মোডের সিগন্যাল ফেজ ক্রম দেখায়।


হাফ ড্রাইভ স্টেপিং মোড
সাধারণভাবে, স্টেপিং এঙ্গেল স্টেপার মোটরের রেজোলিউশনের উপর নির্ভর করে। পদক্ষেপগুলির আকার এবং আবর্তনের দিক ইনপুট ক্রমের সংখ্যা এবং ক্রমের সাথে সরাসরি সমানুপাতিক। শ্যাফটের ঘূর্ণন গতি ইনপুট অনুক্রমের ফ্রিকোয়েন্সি উপর নির্ভর করে। একবারে চৌম্বকযুক্ত টর্ক এবং চুম্বকের সংখ্যা আনুপাতিক।
স্টিপার মোটরটির জন্য 60mA বর্তমান প্রয়োজন, তবে এটমেগা মাইক্রোকন্ট্রোলার এটি 89C51 এর সর্বাধিক বর্তমান রেটিং 50 এমএ। সুতরাং, একটি স্টিপার-মোটর-কন্ট্রোলার সিগন্যালগুলি স্থানান্তর করার জন্য মাইক্রোকন্ট্রোলারের সাথে স্টেপার মোটরটিকে ইন্টারফেস করতে আইসিসিউজড।
2. ট্রানজিস্টর ব্যবহার করে নিয়ন্ত্রণ স্যুইচ সার্কিট
স্টেপ-ডাউন ট্রান্সফর্মার ব্যবহার করে 230V থেকে 7.5V তে ভোল্টেজ নামিয়ে দিয়ে সার্কিটের পাওয়ার সরবরাহ দেওয়া যেতে পারে এবং তারপরে ডায়োড সহ একটি ব্রিজ দ্বারা সংশোধনকারী । এই সংশোধিত আউটপুটটি একটি ফিল্টার ক্যাপাসিটারকে খাওয়ানো হয় এবং তারপরে ভোল্টেজ নিয়ন্ত্রকের মধ্য দিয়ে যায়। 5 ভি নিয়ন্ত্রিত আউটপুটটি ভোল্টেজ নিয়ন্ত্রকের কাছ থেকে পাওয়া যায়। রিসেট পিন 9 ক্যাপাসিটার এবং রেজিস্টারের মধ্যে সংযুক্ত।

ট্রানজিস্টার ব্যবহার করে স্টিপার মোটর কন্ট্রোল সার্কিট
সাধারণভাবে, স্টিপার মোটরটি চারটি কয়েল থাকে যা চিত্রে দেখানো হয়েছে। সুতরাং, মোটর চালাতে, মোটর-চালক চারটি সার্কিট প্রয়োজন। মোটর চালানোর জন্য স্টিপার মোটর কন্ট্রোলার আইসি ব্যবহার না করে, চারটি ট্রানজিস্টর যথাক্রমে মাইক্রোকন্ট্রোলারের 21, 22, 23 এবং 24 পিনে ড্রাইভার সার্কিট হিসাবে সংযুক্ত থাকে।
যদি ট্রানজিস্টরগুলি চালনা শুরু করে, তবে কয়েলটির চারপাশে একটি চৌম্বকীয় ক্ষেত্র তৈরি হবে যার ফলে মোটর আবর্তিত হবে। স্টিপার মোটর গতি ইনপুট পালসের ফ্রিকোয়েন্সিটির সাথে সরাসরি আনুপাতিক। প্রায় 11.019MHz এর মাইক্রোকন্ট্রোলার ক্লক ফ্রিকোয়েন্সি সরবরাহ করতে একটি স্ফটিক দোলক 18 এবং 19 পিনের সাথে সংযুক্ত থাকে।
যে কোনও নির্দেশের কার্যকর করার সময়টি নীচের সূত্রটি ব্যবহার করে গণনা করা যেতে পারে
সময় = ((সি * 12)) / এফ
যেখানে সি = চক্রের সংখ্যা
এবং এফ = স্ফটিক ফ্রিকোয়েন্সি
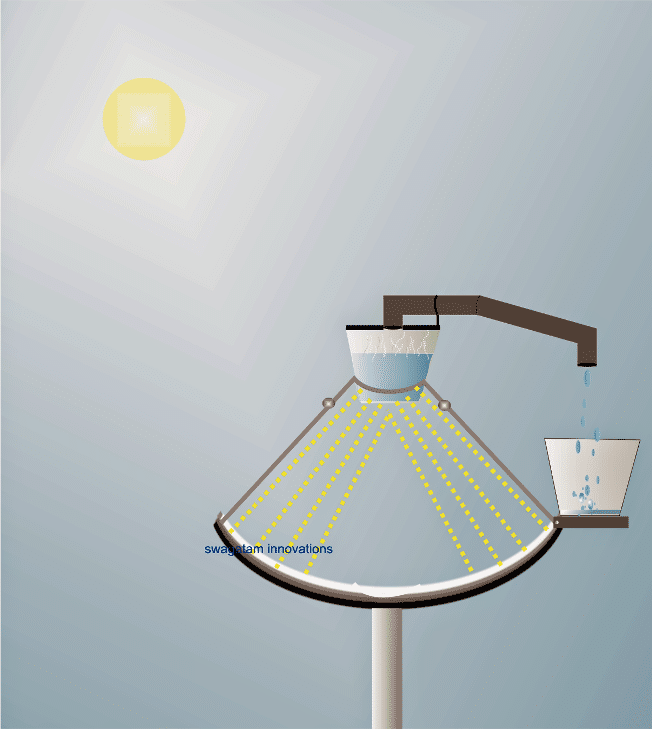
সোলার প্যানেল ঘোরানোর জন্য স্টিপার মোটর ব্যবহার করে এমন একটি অ্যাপ্লিকেশন ভিত্তিক সার্কিট নীচে বর্ণিত হয়েছে।
প্রোগ্রামার 8051 মাইক্রোকন্ট্রোলার ব্যবহার করে স্টিপার মোটর কন্ট্রোল
সান ট্র্যাকিং সোলার প্যানেল প্রকল্প সোলার প্যানেলটি স্বয়ংক্রিয়ভাবে সামঞ্জস্য করে সর্বাধিক পরিমাণ শক্তি উত্পাদন করার উদ্দেশ্যে। এই প্রকল্পে, সোলার প্যানেলগুলির মুখটি সর্বদা সূর্যের খণ্ডে রক্ষার জন্য 8051 পরিবারের একটি প্রোগ্রামযুক্ত মাইক্রোকন্ট্রোলার দ্বারা নিয়ন্ত্রিত একটি স্টিপার মোটরটি সৌর প্যানেলে ইন্টারফেস করা হয়।

Edgefxkits.com দ্বারা মাইক্রোকন্ট্রোলার ব্যবহার করে স্টিপার মোটর কন্ট্রোল
দ্য প্রোগ্রামযুক্ত মাইক্রোকন্ট্রোলার সৌর প্যানেল ঘোরানোর জন্য স্টেপার মোটরকে নিয়মিত বিরতিতে স্টেপড বৈদ্যুতিক ডাল তৈরি করে। ড্রাইভার আইসি স্টিপার মোটর চালাতে ব্যবহৃত হয় কারণ নিয়ামক মোটরের পাওয়ার প্রয়োজনীয়তা সরবরাহ করতে অক্ষম unable
নীচের মন্তব্য বিভাগে মন্তব্য পোস্ট করে আপনার পরামর্শ, মতামত এবং প্রশ্নের ছেড়ে দিন। এই নিবন্ধটি সম্পর্কিত এবং প্রযুক্তিগতভাবে আপনাকে সহায়তা করার জন্য আমরা যথাসাধ্য চেষ্টা করব বৈদ্যুতিক এবং ইলেকট্রনিক্স প্রকল্প উন্নয়নশীল স্টিপার মোটর ব্যবহার করে।