পোস্টটি তাদের একার ফেজ ভেরিয়েবল ফ্রিকোয়েন্সি ড্রাইভ সার্কিট বা এসি মোটর নিয়ন্ত্রণের জন্য একটি ভিএফডি সার্কিট তাদের অপারেশনাল স্পেসিফিকেশনকে প্রভাবিত না করে আলোচনা করে।
ভিএফডি কী?
মোটর এবং অন্যান্য অনুরূপ প্রেরণামূলক বোঝা বিশেষত তাদের উত্পাদন স্পেসের মধ্যে নাও থাকতে পারে এমন ফ্রিকোয়েন্সিগুলির সাথে পরিচালনা করে 'পছন্দ করে না' এবং এই ধরনের অস্বাভাবিক পরিস্থিতিতে বাধ্য হয়ে যদি অনেকটা অকেজো হয়ে যায়।
উদাহরণস্বরূপ, 60Hz এর সাথে অপারেটিংয়ের জন্য নির্দিষ্ট মোটরটি 50 Hz বা অন্যান্য রেঞ্জের ফ্রিকোয়েন্সি সহ কাজ করার পরামর্শ দেওয়া হতে পারে না।
এটি করার ফলে মোটর গরম করা, প্রয়োজনীয় গতির চেয়ে কম বা উচ্চতর এবং অস্বাভাবিকভাবে বেশি খরচ হওয়া সংযুক্ত ডিভাইসটির জিনিসগুলিকে খুব অদক্ষ এবং নিম্নজীবনের অবনতি হিসাবে অনাকাঙ্ক্ষিত ফলাফল আনতে পারে।
তবে বিভিন্ন ইনপুট ফ্রিকোয়েন্সি অবস্থার অধীনে অপারেটিং মোটরগুলি প্রায়শই বাধ্যবাধকতায় পরিণত হয় এবং এই জাতীয় পরিস্থিতিতে একটি ভিএফডি বা একটি পরিবর্তনশীল ফ্রিকোয়েন্সি ড্রাইভ সার্কিট খুব সহজ হয়ে যায়।
ভিএফডি হ'ল একটি ডিভাইস যা ব্যবহারকারীকে মোটর স্পেসিফিকেশন অনুযায়ী ইনপুট সরবরাহের ফ্রিকোয়েন্সি এবং ভোল্টেজ সামঞ্জস্য করে একটি এসি মোটরের গতি নিয়ন্ত্রণ করতে দেয়।
এর অর্থ হ'ল ভিএফডি আমাদের মোটামুটি মোটর স্পেসিফিকেশন অনুযায়ী ভিএফডি ফ্রিকোয়েন্সি এবং ভোল্টেজকে কাস্টমাইজ করে, কোনও ভোল্টেজ এবং ফ্রিকোয়েন্সি স্পেস নির্বিশেষে যে কোনও উপলব্ধ গ্রিড এসি সরবরাহের মাধ্যমে যে কোনও এসি মোটর পরিচালনা করতে দেয়।
এটি সাধারণত প্রদত্ত নিয়ন্ত্রণটি বিভিন্ন ফ্রিকোয়েন্সি ক্যালিব্রেশন সহ ভেরিয়েবল নোব আকারে দেওয়া হয়।
বাড়িতে ভিএফডি তৈরি করা একটি কঠিন প্রস্তাব বলে মনে হতে পারে, তবে নীচে প্রস্তাবিত ডিজাইনের এক নজরে দেখায় যে সর্বোপরি এই খুব দরকারী ডিভাইসটি তৈরি করা এতটা কঠিন নয় (আমার নকশা করা)।
সার্কিট অপারেশন
সার্কিটটি মৌলিকভাবে দুটি পর্যায়ে বিভক্ত করা যেতে পারে: হাফ ব্রিজে ড্রাইভার স্টেজ এবং পিডব্লিউএম লজিক জেনারেটর স্টেজ।
অর্ধ সেতুর ড্রাইভার স্টেজ অর্ধ সেতু ড্রাইভার আইসি আইআর 2110 ব্যবহার করে যা এককভাবে উচ্চ ভোল্টেজ মোটর ড্রাইভের মঞ্চটি যথাক্রমে দুটি উচ্চ পাশ এবং নিম্ন পাশের ম্যাসেফ্টগুলি সমন্বিত করে care
ড্রাইভার আইসি এইভাবে সার্কিটের কেন্দ্রস্থল গঠন করে তবে এই গুরুতর ক্রিয়াটি বাস্তবায়নের জন্য কয়েকটি উপাদান প্রয়োজন।
উপরের আইসিটিতে কাঙ্ক্ষিত নির্দিষ্ট ফ্রিকোয়েন্সিটিতে সংযুক্ত লোড চালনার জন্য ফ্রিকোয়েন্সিগুলিতে একটি উচ্চ যুক্তি এবং কম যুক্তির প্রয়োজন হবে।
এই হাই এবং লো ইনপুট লজিক সংকেতগুলি ড্রাইভার আইসি-র জন্য অপারেটিং ডেটা হয়ে ওঠে এবং নির্দিষ্ট ফ্রিকোয়েন্সি নির্ধারণের জন্য সংকেতগুলি পাশাপাশি মেন এসির সাথে পর্যায়ক্রমে পিডব্লিউএম অন্তর্ভুক্ত করতে হবে।
উপরের তথ্যটি 555 আইসি এবং একটি দশকের কাউন্টার নিয়ে গঠিত আরও একটি পর্যায় দ্বারা তৈরি করা হয়েছে। আইসি 4017।
দুটি 555 আইসি একটি স্টেপড ডাউন ব্রিজ রেক্টিফায়ার আউটপুট থেকে প্রাপ্ত পূর্ণ তরঙ্গ এসি নমুনার সাথে সম্পর্কিত সংশোধিত সাইন ওয়েভ পিডাব্লুএমএম উত্পাদন করার জন্য দায়বদ্ধ।
আইসি 4017 টোটেম মেরু আউটপুট লজিক জেনারেটরের হিসাবে কাজ করে যার পরিবর্তিত ফ্রিকোয়েন্সি রেট সার্কিটের প্যারামিটার নির্ধারণ করে IN
এই নির্ধারণকারী ফ্রিকোয়েন্সিটি আইসি 1 এর পিন # 3 থেকে নেওয়া হয়েছে যা আইসি 2 ট্রিগার পিন আউট এবং আইসি 2 এর পিন # 3 এ পরিবর্তিত পিডাব্লুএমএম তৈরির জন্য ফিড দেয়।
অর্ধ সেতুর ড্রাইভারের আউটপুটটিতে সংশোধিত পিডব্লিউএমগুলির সঠিক 'প্রিন্ট' সুপারিশ করার জন্য এবং শেষ পর্যন্ত পরিচালিত মোটরটির জন্য পরিবর্তিত সাইন ওয়েভ পিডাব্লুএমগুলি আইআর 2110 খাওয়ানোর আগে 4017 আইসি এর আউটপুটগুলিতে স্ক্যান করা হয়।
মোটর জন্য সঠিক নির্দিষ্ট ফ্রিকোয়েন্সি সরবরাহ করতে Cx এবং 180k পাত্রের মানগুলি যথাযথভাবে নির্বাচিত বা সমন্বয় করা উচিত।
হাই পার্শ্বের মোসফেটের ড্রেনের উচ্চ ভোল্টেজটিকে যথাযথভাবে গণনা করতে হবে এবং উপলব্ধ মাইন ভোল্টেজ এসি যথাযথভাবে ধাপে ধাপে ধরিয়ে ধাক্কা দেওয়ার পরে মোটর স্পেস অনুযায়ী এটি নিচে নামিয়ে নেওয়া উচিত।
উপরের সেটিংসটি নির্দিষ্ট মোটরের জন্য হার্টজ (ভি / হার্জ) প্রতি সঠিক ভোল্ট নির্ধারণ করবে।
উভয় পর্যায়ে সরবরাহের ভোল্টেজকে একটি সাধারণ লাইন তৈরি করা যেতে পারে, স্থল সংযোগের জন্য একই।
টিআর 1 হ'ল 0-12V / 100mA ট্রান্সফর্মার যা প্রয়োজনীয় অপারেটিং সাপ্লাই ভোল্টেজ সহ সার্কিট সরবরাহ করে।
পিডব্লিউএম কন্ট্রোলার সার্কিট

আপনাকে উপরের চিত্রটি আইসি 4017 থেকে নিম্নলিখিত চিত্রের এইচএন এবং লিন ইনপুটগুলিতে যথাযথভাবে একীভূত করতে হবে। এছাড়াও, উপরের চিত্রের মধ্যে চিহ্নিত 1N4148 ডায়োডগুলি নিম্ন পাশের মোসফেট গেটগুলির সাথে নীচের চিত্রের মতো সংযুক্ত করুন।
পূর্ণ সেতু মোটর ড্রাইভার

হালনাগাদ:

উপরোক্ত আলোচিত সাধারণ একক ভিএফডি নকশাকে স্ব-দোলায়িত পূর্ণ ব্রীজ আইসি আইআরএস 2453 ব্যবহার করে আরও সরল ও উন্নত করা যেতে পারে, নীচে দেখানো হয়েছে:
এখানে আইসি 4017 সম্পূর্ণরূপে নির্মূল করা হয়েছে যেহেতু ফুল সেতু ড্রাইভারটি তার নিজস্ব দোলক পর্যায়ে সজ্জিত, এবং তাই এই আইসির জন্য কোনও বাহ্যিক ট্রিগার প্রয়োজন হয় না।
সম্পূর্ণ ব্রিজ ডিজাইনের কারণে মোটরটির আউটপুট নিয়ন্ত্রণের শূন্য থেকে সর্বোচ্চ গতির সামঞ্জস্যের পূর্ণ পরিসীমা থাকে।
আইসি 2 এর পিন # 5 এ পাত্রটি পিডব্লিউএম পদ্ধতির মাধ্যমে গতির গতি এবং টর্ককে নিয়ন্ত্রণ করতে ব্যবহার করা যেতে পারে।
ভি / হার্টজ স্পিড কন্ট্রোলের জন্য আইআরএস 2453 এবং আই 1 এর সাথে যুক্ত আর 1 এর সাথে যুক্ত আরটি / সিটি যথাযথ ফলাফল পাওয়ার জন্য যথাক্রমে টুইঙ্ক করা যেতে পারে (ম্যানুয়ালি)।
আরও সরলকরণ

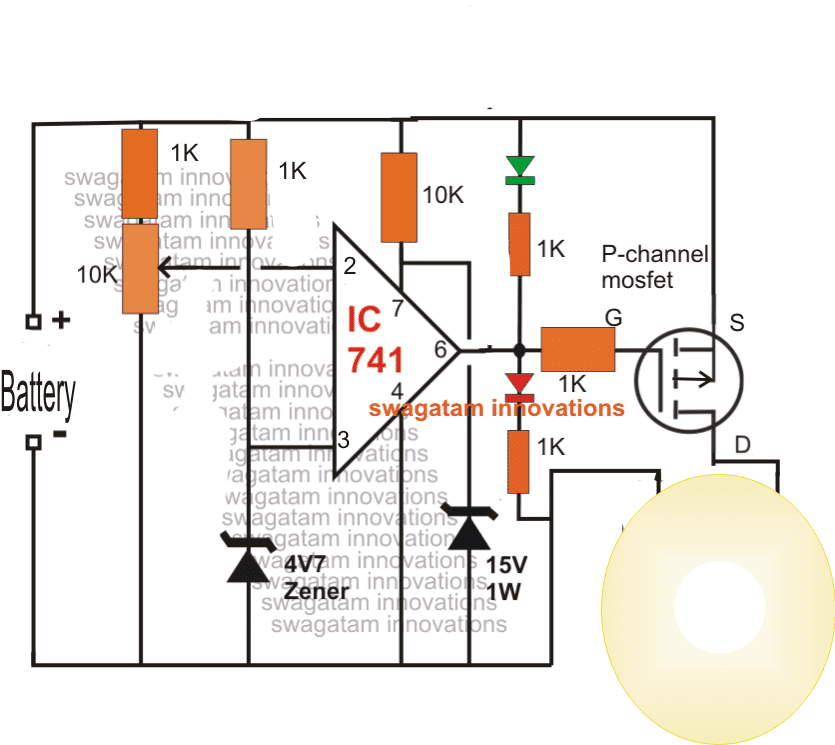
আপনি যদি পুরো ব্রিজ বিভাগটিকে অপ্রতিরোধ্য মনে করেন তবে নীচে দেখানো হিসাবে আপনি এটি পি, এন-মফসেট ভিত্তিক পূর্ণ ব্রিজ সার্কিটের সাথে প্রতিস্থাপন করতে পারেন। এই পরিবর্তনশীল ফ্রিকোয়েন্সি ড্রাইভার সম্পূর্ণ সেতু ড্রাইভার বিভাগ ব্যতীত একই ধারণাটি ব্যবহার করে যা পি-চ্যানেল এমওএসএফইটি উচ্চতর দিকে এবং নীচের দিকে এন-চ্যানেল এমওএসএফইটিএস নিয়োগ করে।
যদিও প্যানেল চ্যানেল এমওএসএফইটিগুলির (তাদের উচ্চ আরডিএসন রেটিংয়ের কারণে) জড়িত থাকার কারণে কনফিগারেশনটি অদৃশ্য বলে মনে হতে পারে, তবে অনেকগুলি সমান্তরাল পি-মোসফেট ব্যবহার কম আরডিএসন সমস্যা সমাধানের জন্য কার্যকর পদ্ধতির মতো দেখায়।
এন-চ্যানেল সমতুল্য অংশগুলির সমতুল্য ডিভাইসগুলির হিটিং হিটিং নিশ্চিত করার জন্য পি-চ্যানেল ডিভাইসের জন্য সমান্তরালে 3 টি এমওএসএফইটি ব্যবহার করা হয়।
পূর্ববর্তী: এমওএসএফইটিগুলি কীভাবে সুরক্ষিত করা যায় - বেসিকগুলি ব্যাখ্যা করা হয়েছে পরবর্তী: সৌর এমপিপিটি অ্যাপ্লিকেশনগুলির জন্য I / V ট্র্যাকার সার্কিট