প্রস্তাবিত সাইনওয়েভ বৈদ্যুতিন সংকেতের মেরু বদল ইউপিএস সার্কিটটি PIC16F72 মাইক্রোকন্ট্রোলার, কিছু প্যাসিভ ইলেকট্রনিক উপাদান এবং সম্পর্কিত পাওয়ার ডিভাইস ব্যবহার করে নির্মিত হয়েছে।
ডেটা সরবরাহ করেছেন: মিঃ হিশাম বাহা-অ্যালডিন
প্রধান বৈশিষ্ট্য:
আলোচিত PIC16F72 সাইনওয়েভ ইনভার্টারের মূল প্রযুক্তিগত বৈশিষ্ট্যগুলি নিম্নলিখিত তথ্যগুলি থেকে মূল্যায়ন করা যেতে পারে:
পাওয়ার আউটপুট (625 / 800va) সম্পূর্ণ কাস্টমাইজেশন এবং অন্যান্য পছন্দসই স্তরে আপগ্রেড করা যায়।
ব্যাটারি 12 ভি / 200 এএইচ
বৈদ্যুতিন সংকেতের মেরু বদল আউটপুট ভোল্ট: 230v (+ 2%)
বৈদ্যুতিন সংকেতের মেরু বদল আউটপুট ফ্রিকোয়েন্সি: 50Hz
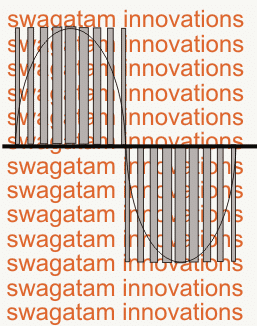
বৈদ্যুতিন সংকেতের মেরু বদল আউটপুট ওয়েভফর্ম: পিডাব্লুএম মডুলেটেড সাইন ওয়েভ
সুরেলা বিকৃতি: 3% এরও কম
ক্রেস্ট ফ্যাক্টর: 4: 1 এরও কম
বৈদ্যুতিন সংকেতের মেরু বদল দক্ষতা: 24v সিস্টেমের জন্য 90%, 12v সিস্টেম সহ প্রায় 85%
শ্রবণযোগ্য শব্দ: 1-মিটার এ 60db কম
বৈদ্যুতিন সংকেতের মেরু বদল সুরক্ষা বৈশিষ্ট্য
লো-ব্যাটারি শাট-ডাউন
ওভারলোড শাট ডাউন
আউটপুট শর্ট সার্কিট শাট ডাউন
লো-ব্যাটারি সনাক্তকরণ এবং শাটডাউন বৈশিষ্ট্য
বীপ শুরু 10.5v তে শুরু হয়েছিল (প্রতি 3 সেকেন্ডে বীপ)
বৈদ্যুতিন সংকেতের মেরু বদল প্রায় 10v এ (প্রতিটি 2 সেকেন্ডে বীপের 5 টি ডাল)
ওভার লোড: 120% লোডে বিপ চালু করা (2 সেকেন্ডের হারে বীপ)
ইনভার্টার শাট ডাউন ডাউন 130% ওভারলোড (প্রতি 2 সেকেন্ডে 5 টি ডাল বীপের)
নিম্নলিখিত জন্য এলইডি সূচক সরবরাহ করা হয়:
ইনভার্টার চালু
ব্যাটারীর চার্জ কম - অ্যালার্ম সহ লো ব্যাটারি মোডে ফ্ল্যাশিং
সলিড অন কাট-অফের সময়
ওভার লোড - অ্যালার্মের সাথে ওভারলোড কাট-অফে ফ্ল্যাশিং
সলিড অন কাট-অফের সময়
চার্জিং মোড - চার্জিং মোডে ফ্ল্যাশিং
শোষণের সময় সলিড অন
মুখ্য ইঙ্গিত - LED চালু
সার্কিট বিশেষ উল্লেখ
8-বিট মাইক্রোকন্ট্রোলার ভিত্তিক নিয়ন্ত্রণ সার্কিট
এইচ-ব্রিজ ইনভার্টার টপোলজি
মোসফেট স্যুইচিং ফল্ট সনাক্তকরণ
চার্জিং অ্যালগরিদম: মোসফেট পিডাব্লুএম ভিত্তিক সুইচ মোড চার্জার কন্ট্রোলার 5-এম্প / 15-এমপি
দ্বি-পদক্ষেপ চার্জ পদক্ষেপ -১: বুস্ট মোড (নেতৃত্বাধীন ফ্ল্যাশ)
পদক্ষেপ -২: শোষণের মোড (নেতৃত্বাধীন)
চার্জিং / ইনভেশন অপারেশন চলাকালীন অভ্যন্তরীণ শীতলকরণের জন্য ডিসি ফ্যান সূচনা
বর্তনী চিত্র:

পিআইসি কোডগুলি দেখা যায় এখানে
পিসিবি বিশদ সরবরাহ করা হয় এখানে
নিম্নলিখিত ব্যাখ্যা নকশার সাথে জড়িত বিভিন্ন সার্কিট পর্যায়ের বিবরণ সরবরাহ করে:
হালনাগাদ:
আপনি এটি নির্মাণ করা খুব সহজ উল্লেখ করতে পারেন খাঁটি সাইন ওয়েভ আরডুইনো ভিত্তিক ইনভার্টার সার্কিট।
ইনভার্টার মোডে
মেন ব্যর্থ হওয়ার সাথে সাথে ব্যাটারির যুক্তিটি আইসি-র পিন # 22 এ সনাক্ত করা যায় যা তাত্ক্ষণিকভাবে নিয়ামক বিভাগটিকে ইনভার্টার / ব্যাটারি মোডে স্যুইচ করতে অনুরোধ করে।
এই মোডে নিয়ামকটি তার পিন # 13 (সিসিপি আউট) এর মাধ্যমে প্রয়োজনীয় পিডব্লিউএম তৈরি করতে শুরু করে, তবে পিআরডব্লিউএম প্রজন্মের হারটি পিন # 16 (আইএনভি / ইউপিএস স্যুইচ) এ লজিক স্তরটি নিশ্চিত করার পরেই প্রয়োগ করা হয়।
যদি এই পিনটিতে একটি উচ্চ যুক্তি সনাক্ত করা যায় (আইএনভি মোড) নিয়ামক পুরোপুরি পরিমিত শুল্ক চক্র শুরু করেন যা প্রায় %০% এবং আইসির নির্দেশিত পিনআউটে একটি কম যুক্তির ক্ষেত্রে, তবে নিয়ামকটি উত্পন্ন করতে অনুরোধ করা যেতে পারে 250 মি.এস. পিরিয়ডের হারে 1% থেকে 70% অবধি পিডব্লুএমস ফেটে যা ইউপিএস মোডে থাকাকালীন নরম বিলম্বের আউটপুট হিসাবে আখ্যায়িত হয়।
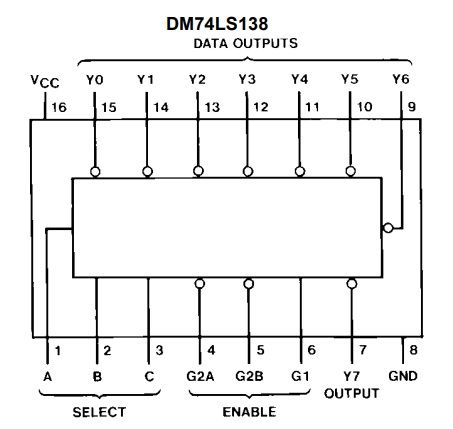
পিডাব্লুএমএম সহ কন্ট্রোলার পিআইসির পিন # 13 পিনের মাধ্যমে একটি 'চ্যানেল সিলেক্ট' লজিক তৈরি করে যা আইসি সিডি 4081 এর # 8 পিনে প্রয়োগ করা হয়।
ডালের প্রাথমিক সময়কালে (অর্থাত 10 মিমি) পিডাব্লুএম নিয়ামকের পিন 12 উচ্চতরভাবে উপস্থাপিত হয় যাতে পিডব্লিউএম সিডি 4081 এর পিন 10 থেকে একচেটিয়াভাবে পাওয়া যায় এবং 10 মিটার পরে, নিয়ামকের পিন 14 লজিক উচ্চ হয় এবং পিডাব্লুএম এর পিন 11 থেকে অ্যাক্সেসযোগ্য হয় সিডি 4081, ফলস্বরূপ এই পদ্ধতিটি ব্যবহার করে এক জোড়া অ্যান্টি-ফেজড পিডাব্লুএমএম মোসফেটগুলি স্যুইচ করতে অ্যাক্সেসযোগ্য হয়ে ওঠে।
PWM নিয়ন্ত্রকের পিন 11 থেকে একটি উচ্চ লজিক (5 ভি) অ্যাক্সেসযোগ্য হয়ে উঠেছে, প্রতি বার ইনভার্টার চালু থাকাকালীন এই পিনটি উচ্চ হয়ে যায় এবং যখনই ইনভার্টার বন্ধ থাকে তখন কম থাকে। এই হাই লজিকটি দুটি মোসফেট ব্যাঙ্কের উচ্চ পাশের এমওএসএফইটি সক্রিয় করতে প্রতিটি মোসফেট ড্রাইভার ইউ 1 এবং ইউ 2, (এইচআই পিন) এর পিন 10 এ প্রয়োগ করা হয়।
প্রস্তাবিত মাইক্রোকন্ট্রোলার সাইনওয়েভ ইউপিএস আপগ্রেড করার জন্য, নিম্নলিখিত ডেটাগুলি যথাযথভাবে ব্যবহার এবং প্রয়োগ করা যেতে পারে।

নিম্নলিখিত তথ্যগুলি সম্পূর্ণ ট্রান্সফর্মার ঘুরানোর বিশদ সরবরাহ করে:

মিঃ হিশামের প্রতিক্রিয়া:
হাই মিঃ স্বজাতাম, কেমন আছেন?
আমি আপনাকে বলতে চাই যে খাঁটি সাইন ওয়েভ ইনভার্টার স্কিমেটিকের কিছু ভুল রয়েছে, 220uf বুটস্ট্র্যাপ ক্যাপাসিটার একটি (22 ইউফ বা 47 ইউফ বা 68 ইউফ) এর সাথে প্রতিস্থাপন করা উচিত, একটি 22 ইউফ ক্যাপাসিটার যা 2 এর আই 2121 এর পিন 1 এবং পিন 2 এর মধ্যে সংযুক্ত থাকে এবং এটি সরানো উচিত, এছাড়াও এলেটেক নামে একটি হেক্স কোডও রয়েছে। কম ব্যাটারি নেতৃত্বাধীন এবং বুজার বীপ সহ 15 সেকেন্ড পরে হেক্স ব্যবহারের কারণে তার মেক ইনভার্টার শাটডাউন করা উচিত নয়, যদি আপনার বড় ডিসি ফ্যান থাকে তবে ট্রানজিস্টরগুলিকে একটি উচ্চতর স্রোতের সাথে প্রতিস্থাপন করা উচিত, ম্যাসেজগুলির সুরক্ষার জন্য একটি 7812 নিয়ন্ত্রককে সংযুক্ত হওয়ার পরামর্শ দেওয়া হয় ir2110 ... এছাড়াও রয়েছে ডি 14, ডি 15 এবং ডি 16 জমিটির সাথে সংযুক্ত হওয়া উচিত নয়।
আমি এই বৈদ্যুতিন সংকেতের মেরু বদল এবং এর সত্যিকারের খাঁটি সিন ওয়েভ পরীক্ষা করেছি, আমি কোনও ওয়াশিং মেশিন চালিয়েছি এবং এটি কোনও শব্দ ছাড়াই নিঃশব্দে চলমান আছে, আমি আউটপুটে একটি 220nf ক্যাপসিটারটি 2.5uf এর পরিবর্তে সংযুক্ত করেছি, ফ্রিজও কাজ করছে, আমি কিছু ছবি শেয়ার করব শীঘ্রই.
শুভেচ্ছান্তে


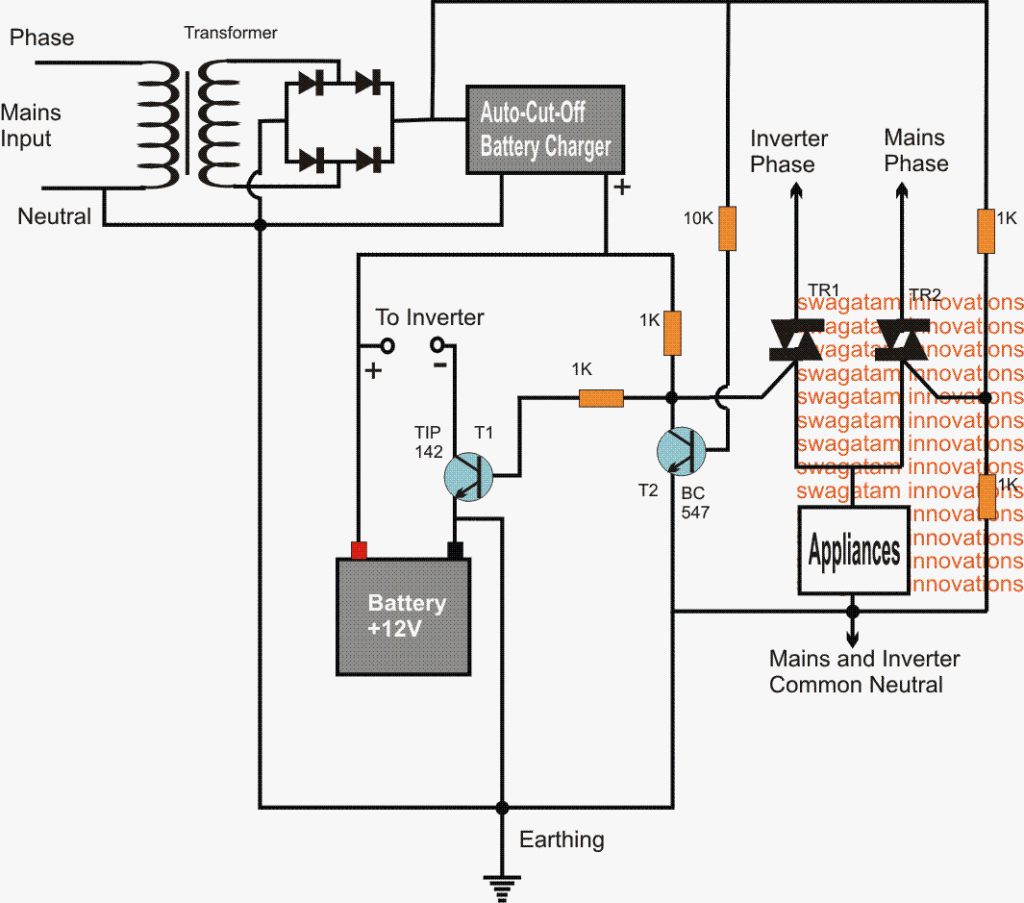
উপরের নিবন্ধে আলোচিত পরিকল্পনাটি মিঃ হিশামের দ্বারা কয়েকটি যথাযথ সংশোধন করে পরীক্ষা করা ও সংশোধন করা হয়েছিল, যেমন নীচের চিত্রগুলিতে দেখানো হয়েছে, দর্শকরা এর কার্যকারিতা উন্নতির জন্য এগুলি উল্লেখ করতে পারে:


এখন আসুন আমরা নীচের ব্যাখ্যার মাধ্যমে কীভাবে মোসফেট স্যুইচিং স্টেজ তৈরি করা যায় তা অধ্যয়ন করি।

মোসফেট স্যুইচিং:
পরিক্ষা কর মোসফেট স্যুইচিং সার্কিট ডায়াগ্রাম নীচে:

এক্ষেত্রে ইউ 1 (আইআর 2110) এবং ইউ 2 (আইআর 2110) হাই সাইড / লো সাইড মোসফেট ড্রাইভার নিযুক্ত করা হয়েছে, আরও বুঝতে এই আইসির ডেটা শীটটি পরীক্ষা করুন। এতে হাই সাইড এবং লো সাইড এমওএসএফইটি সহ দুটি এমওএসএফইটি ব্যাংক ট্রান্সফর্মারের প্রাথমিক সাইড স্যুইচিংয়ের উদ্দেশ্যে।
এক্ষেত্রে আমরা কেবলমাত্র পরিপূরক ব্যাংক ড্রাইভিং একে অপরের থেকে পৃথক না হওয়ার কারণে ব্যাঙ্কের কার্যকারিতা (আইসি ইউ 1 প্রয়োগ করা) নিয়ে আলোচনা করছি।
বৈদ্যুতিন সংকেতের মেরু বদল চালু হওয়ার সাথে সাথেই ইউ 1 এর পিন 10 যুক্তিযুক্ত উচ্চ যা পরবর্তীকালে উচ্চ পাশের এমওএসএফইটি (এম 1 - এম 4) চালু করে, সিডি 4081 এর পিন 10 থেকে চ্যানেল -1 এর জন্য পিডাব্লুএমএম ড্রায়ার আইসি (ইউ 1) এর পিন 12 এ প্রয়োগ করা হয় ) এবং তেমনিভাবে এটি আর 25 এর মাধ্যমে Q1 এর বেসে পরিচালিত হয়।
পিডাব্লুএমএম লজিক উচ্চতর হলেও ইউ 1 এর পিন 12 এছাড়াও যুক্তিযুক্ত উচ্চ এবং ব্যাঙ্ক 1 (এম 9 - এম 12) এর নিম্ন পাশের এমওএসএফইটিগুলি ট্রিগার করে, পর্যায়ক্রমে এটি ট্রানজিস্টর চালু করে
Q1 যা যথাযথভাবে ইউ 1 লজিকের পিন 10 ভোল্টেজকে রেন্ডার করে, তারপরে উচ্চ পাশের মোসফেটগুলি (এম 1 - এম 4) বন্ধ করে দেয়।
সুতরাং এটি সূচিত করে যে ডিফল্টরূপে এর পিন 11 থেকে উচ্চ যুক্তিযুক্ত মাইক্রোকন্ট্রোলার দুটি মোসফেট অ্যারেগুলির মধ্যে হাই পার্শ্বের মোসফেটগুলির জন্য স্যুইচ করা হয়ে যায়, এবং সম্পর্কিত পিডব্লিউএম উচ্চতর থাকাকালীন নিম্ন পাশের মোসফেটগুলি চালু করা হয় এবং উচ্চ পাশের এমওএসএফইটিগুলি বন্ধ করা হয়, এবং এই মাধ্যমে স্যুইচিং ক্রমটি পুনরাবৃত্তি করে চলে keeps
মোসফেট স্যুইচিং সুরক্ষা
ইউ 1-এর পিন 11 প্রতিটি ড্রাইভার ইউনিটের হার্ডওয়্যার লকিং প্রক্রিয়া চালানোর জন্য ব্যবহার করা যেতে পারে।
স্ট্যান্ডার্ড ফিক্সড মোডে এই পিনটি কম যুক্তির সাথে সংশোধন করা হতে পারে তবে যখনই কোনও পরিস্থিতিতে নীচের দিকের এমওফাইটি স্যুইচিং শুরু করতে ব্যর্থ হয় (আসুন ধরে নেওয়া যাক o / p শর্ট সার্কিট বা আউটপুটে ভ্রান্ত নাড়ি জেনারেশন) এর ভিডিএস ভোল্টেজ নিম্ন পাশের এমওএসএফইটিগুলি শুট আপ হওয়া আশা করা যেতে পারে যার ফলে তুলনামূলক আউটপুট পিন 1 (ইউ 4) তত্ক্ষণাত উঁচুতে যায় এবং ডি 27 এর সাহায্যে ল্যাচ হয়ে যায় এবং উচ্চ যুক্তিতে ইউ 1 এবং ইউ 2 এর পিন 11 উপস্থাপন করে এবং এর ফলে দুটি টগল অফ করে দেয় মোসফেট ড্রাইভারগুলি কার্যকরভাবে পর্যায়ক্রমে, মোসফেটগুলি বার্ন এবং ক্ষতিগ্রস্থ হওয়া থেকে রোধ করে।
পিন 6 এবং পিন 9 আইসির + ভিসি (+ 5 ভি) এর মধ্যে রয়েছে, পিন 3 হ'ল মোসফেট গেট ড্রাইভ সরবরাহের জন্য 12V এর, পিন 7 হ'ল পাশের মোসফেট গেট ড্রাইভ, পিন 5 হ'ল পাশের মোসফেট গ্রহণের পথ, পিন 1 নিম্ন পাশের মোসফেট ড্রাইভ, এবং পিন 2 হ'ল নিম্ন পাশের মোসফেট receiving পিন 13 আইসি (ইউ 1) এর স্থল ground
কম ব্যাটারি সুরক্ষা:
নিয়ামক বৈদ্যুতিন সংকেতের মেরু বদল মোডে কাজ করার সময় এটি বার বার তার পিন 4 (BATT SENSE), পিন 7 (ওভার লোড ইন্দ্রিয়) এবং পিন 2 (এসি মেইন সেন্স) এ ভোল্টেজ পর্যবেক্ষণ করে।
পিন 4 এ ভোল্টেজ যদি 2.6V এর উপরে উঠে যায় তবে কন্ট্রোলার এটির কোনও নজরে না নেবে এবং পরিপূরক সেন্সিং-মোডে পালিয়ে যেতে দেখা যেতে পারে, তবে এখানে ভোল্টেজ প্রায় 2.5V এর দিকে নেমে যাওয়ার সাথে সাথে কন্ট্রোলার স্টেজটি এই স্থানে তার কার্যকারিতা নিষিদ্ধ করবে , বৈদ্যুতিন সংকেতের মেরু বদল মোডে স্যুইচ করা যেমন লো ব্যাটারি এলইডি চালু করে এবং প্রম্পট করে বীপ থেকে বুজার ।
ওভার লোড:
ওভার লোড সুরক্ষা বেশিরভাগ ইনভার্টার সিস্টেমগুলিতে প্রয়োগ করা একটি বাধ্যতামূলক কার্যকারিতা। এখানে উপরে, বৈদ্যুতিন সংকেতের মেরু বদল করার ইভেন্টটি লোডটি নিরাপদ লোডের নির্দিষ্টকরণের বাইরে চলে যাওয়ার জন্য, ব্যাটারি কারেন্টটি প্রথমে নেতিবাচক লাইন ধরে সনাক্ত করা হয় (অর্থাত নিচের দিকের এমওএসএফইটি ব্যাংকের ফিউজ এবং নেতিবাচক পথ ধরে ভোল্টেজ ড্রপ) ) এবং এই ব্যাপকভাবে হ্রাস ভোল্টেজ (এমভিতে) এর দ্বারা আনুপাতিকভাবে তীব্র হয় তুলনামূলক ইউ 5 (পিন 12,13 1nd 14 রচনা) (সার্কিট ডায়াগ্রামের রেফারেন্স তৈরি করুন)।
তুলক (ইউ 5) এর পিন 14 থেকে এই পরিবর্ধিত ভোল্টেজ আউটপুটটি ইনভার্টিং এম্প্লিফায়ার হিসাবে অনাবৃত এবং মাইক্রোকন্ট্রোলারের পিন 7 এ প্রয়োগ করা হয়।
সফ্টওয়্যারটি রেফারেন্সের সাথে ভোল্টেজের তুলনা করে, যা এই নির্দিষ্ট পিনের জন্য 2V হয়। বেশ আগে কথিত হিসাবে কন্ট্রোলার ইনভার্টার-মোডে সিস্টেম অপারেটিং ছাড়াও এই পিনের ভোল্টেজগুলি অনুধাবন করে, প্রতিটি সময় এই পিনের ভোল্টেজ বাড়িয়ে তোলে।
যখনই কন্ট্রোলার আইসি-এর পিন 7-তে ভোল্টেজ 2V এর উপরে থাকে তখন প্রক্রিয়াটি ইনভার্টারটি বন্ধ করে দেয় এবং ওভারলোড মোডে স্যুইচ করে, ইনভার্টারটি বন্ধ করে দেয়, ওভারলোড এলইডি চালু করে এবং বুজারকে বীপ তৈরি করে, যা 9-বিপসের পরে ইনভারটারকে অনুরোধ করে পিন 7-এ দ্বিতীয় বার ভোল্টেজ পরীক্ষা করে আবার স্যুইচড-অন করুন, ধরুন যদি কন্ট্রোলার পিন 7 ভোল্টেজ 2 ভি এর নীচে থেকে চিহ্নিত করে, তবে এটি স্বাভাবিক মোডে ইনভার্টার পরিচালনা করে, অন্যভাবে এটি আবার ইনভার্টারটি সংযোগ বিচ্ছিন্ন করে এবং এই প্রক্রিয়াটি অটো-রিসেট-মোড হিসাবে পরিচিত।
এই নিবন্ধটির মতো আমরা আগেই বলেছি যে ইনভার্টার-মোডে থাকাকালীন, নিয়ামকটি তার পিন 4 (লো-ব্যাটের জন্য), পিন 7 (ওভারলোডের জন্য) এবং এসি মূল ভোল্টেজের জন্য পিন 2 এ ভোল্টেজ পড়েন। আমরা বুঝতে পারি যে সিস্টেমটি সম্ভবত দুটি মোড (ক) ইউপিএস মোড, (খ) ইনভার্টার মোডে কাজ করছে।
সুতরাং পিআইসির পিন 2 ভোল্টেজ পরীক্ষা করার আগে রুটিনের আগে অন্য কোনও কিছুর পূর্বে পিকের পিন 16 এ ইউনিটটি উচ্চ / লো যুক্তি সংবেদন করে কাজ করতে পারে তা নিশ্চিত করে।
মেইন ট্রান্সওভারে ইনভার্টার (INV-MODE):
এই বিশেষ মোডে শীঘ্রই এসি প্রধান ভোল্টেজটি 140 ভি এসির আশেপাশে রয়েছে বলে ধরা পড়ে, পরিবর্তন কর্ম বাস্তবায়িত দেখা যায়, এই ভোল্টেজের প্রান্তিক ব্যবহারকারীর দ্বারা প্রাক-নিষ্পত্তিযোগ্য, বোঝায় যে পিন 2 ভোল্টেজ 0.9V এর উপরে রয়েছে, নিয়ামক আইসি ইনভার্টারটি বন্ধ করে মেইন-অন মোডে স্যুইচ করতে পারে, যেখানে সিস্টেমটি পরীক্ষা করে পিন 2 ভোল্টেজ এসি মেইন ব্যর্থতা পরীক্ষা করতে এবং চার্জিং প্রক্রিয়াটি বজায় রাখার জন্য, যা এই নিবন্ধে আমরা পরে ব্যাখ্যা করব।
ইনভার্টার থেকে ব্যাটারি চেঞ্জওভার (ইউপিএস-মোডি):
এই সেটিংয়ের মধ্যে প্রতিটি সময় এসি মূল ভোল্টেজটি 190 ভি এসির আশেপাশে থাকে পরিবর্তনটি ব্যাটারি মোডে প্রবাহিত হতে দেখা যায়, এই ভোল্টেজের প্রান্তটি সফটওয়্যার প্রি-সেটেটেবলও হয়, যখন পিন 2 ভোলেজটি 1.22V এর উপরে থাকে তখন কন্ট্রোলার হতে পারে বৈদ্যুতিন সংকেতের মেরু বদল চালু করতে এবং ব্যাটারি রুটিনে স্যুইচ করা প্রত্যাশিত যেখানে সিস্টেমটি পিন 2 ভোল্টেজটি এসি মেইনগুলির অনুপস্থিতি যাচাই করতে পরীক্ষা করে এবং চার্জিং শিডিয়ুল পরিচালনা করে যা আমরা নিবন্ধে আরও আলোচনা করব।
ব্যাটারি চার্জ হইতেছে:
MAINs অন ব্যাটারি চার্জ করা শুরু হতে পারে। যেমন আমরা ব্যাটারি চার্জিং মোডে বুঝতে পারি যে এসএমপিএস কৌশলটি ব্যবহার করে সিস্টেমটি কাজ করছে, এখন আসুন আমরা এর পিছনের কার্যনির্বাহীটি বুঝতে পারি।
ব্যাটারি চার্জ করতে আউটপুট সার্কিট (এমওএসএফইটি এবং ইনভার্টার ট্রান্সফর্মার) বুস্ট কনভার্টারের আকারে কার্যকর হয়।
এই ক্ষেত্রে দুটি মোসফেট অ্যারেগুলির সমস্ত নিম্ন পাশের এমওএসএফইটি একটি স্যুইচিং স্টেজ হিসাবে সিঙ্কে কাজ করে যখন ইনভার্টার ট্রান্সফর্মারের প্রাথমিকটি ইন্ডাক্টর হিসাবে আচরণ করে।
যত তাড়াতাড়ি নীচের দিকের সমস্ত এমওএসএফইটি স্যুইচ করা হয় - তড়িৎ বিদ্যুৎ বিদ্যুৎ ট্রান্সফরমারের প্রাথমিক বিভাগে জমা হয়ে যায়, এবং এমওএসএফইটিগুলি বন্ধ হয়ে যাওয়ার সাথে সাথে এই সঞ্চিত বৈদ্যুতিক শক্তি এমওএসএফইটিগুলির অভ্যন্তরে বিল্টড ডায়োড দ্বারা সংশোধন করা হয় এবং ডিসিটি ব্যাটারি প্যাকটিতে ফিরে আসে, এই উত্সাহিত ভোল্টেজটির পরিমাপটি নিম্ন পাশের এমওএসএফইটিগুলির অন-সময় বা চার্জিং প্রক্রিয়ার জন্য ব্যবহৃত শুল্কের কেবল স্থান / স্থান অনুপাতের উপর নির্ভর করে।
পিডব্লিউএম ওয়ার্কিং
সরঞ্জামগুলি মেইন-অন মোডে পরিচালিত হতে পারে, চার্জিং পিডাব্লুএম (মাইক্রোটির পিন 13 থেকে) ক্রমান্বয়ে 1% থেকে সর্বোচ্চ স্পেসিফিকেশনে উন্নীত হয়, যদি পিডব্লিউএম ব্যাটারিতে ডিসি ভোল্টেজ বাড়ায়, ব্যাটারির ভোল্টেজ খুব বেড়ে যায় যা ব্যাটারি চার্জিং কারেন্টের উত্থানের ফলাফল।
দ্য ব্যাটারি চার্জিং বর্তমান ডিসি ফিউজ এবং পিসিবি এর নেতিবাচক রেল জুড়ে পর্যবেক্ষণ করা হয় এবং ভোল্টেজ অতিরিক্তবৃত্তাকার U5 (পিন 8, পিপিন 9 এবং তুলনাকারীর পিন 10) দ্বারা তীব্রতর করা হয় এই পরিবর্ধিত ভোল্টেজ বা সনাক্ত করা বর্তমানকে মাইক্রোকন্ট্রোলারের পিন 5 এ প্রয়োগ করা হয়।
এই পিনের ভোল্টেজটি 1 ভি আকারে সফ্টওয়্যারটিতে নির্ধারিত হয়েছে, এই পিনের ভোল্টেজ 1V এর উপরে উঠার সাথে সাথে নিয়ামক PWM শুল্ক চক্রটিকে অবশেষে 1V এর নীচে টেনে নিচে সীমাবদ্ধ করতে দেখা যাবে, এই পিনের ভোল্টেজ ধরে নিচ্ছে কমানো 1V এর নীচে হ্রাস পেয়ে কন্ট্রোলার তাত্ক্ষণিকভাবে পুরো পিডব্লিউএম আউটপুটটি উন্নতি করতে শুরু করবে এবং কন্ট্রোলার এই পিনের ভোল্টেজ 1V এ বহন করবে এবং ফলস্বরূপ চার্জের বর্তমান সীমাটি এই পদ্ধতিতে চলবে বলে আশা করা যায়।
ইউএনএস পরীক্ষা এবং ভল্ট ফিন্ডিং
প্রতিটি তারের নিশ্চিত করে কার্ডটি তৈরি করুন, এর মধ্যে রয়েছে এলইডি কানেক্টিভিটি, অন / অফ সুইচ, ইনভার্টার ট্রান্সফর্মার মাধ্যমে প্রতিক্রিয়া, সিএন 5-তে 6 ভোল্টের মেইন বুদ্ধি, কার্ডের ব্যাটারি থেকে ভিভি, বড় হিটসিংকের ব্যাটারি ভিও।
প্রাথমিকভাবে ট্রান্সফর্মার প্রাইমারিটি ছোট তাপ ডুবির জোড়ায় প্লাগ করবেন না।
এমসিবি এবং 50-এমপি অ্যামিটারের মাধ্যমে পিসিবিতে ব্যাটারি + তারের প্লাগ ইন করুন।
প্রস্তাবিত পরীক্ষাগুলির জন্য এগিয়ে যাওয়ার আগে পিনের + ভিসি ভোল্টেজ পরীক্ষা করে দেখতে ভুলবেন না
নিম্নলিখিত অনুক্রমের U1 - U5।
ইউ 1: পিন # 8 এবং 9: + 5 ভি, পিন # 3: + 12 ভি, পিন # 6: + 12 ভি,
ইউ 2: পিন # 8 এবং 9: + 5 ভি, পিন # 3: + 12 ভি, পিন 6: + 12 ভি,
ইউ 3: পিন 14: + 5 ভি, ইউ 4: পিন 20: + 5 ভি, পিন 1: + 5 ভি, ইউ 5: পিন 4: + 5 ভি।
1) ব্যাটারি এমসিবি চালিত করুন এবং অ্যামিটারটি পরীক্ষা করুন এবং এটিও নিশ্চিত হন যে এটি 1-এমপি ছাড়িয়ে যাবে না। যদি অ্যাম্পিয়ার অঙ্কুর হয়ে থাকে তবে U1 এবং U2 কে সংক্ষেপে মুছে ফেলুন এবং আবার এমসিসি অন করুন।
2) ইনভারটারের প্রদত্ত অন / অফ স্যুইচটি টগল করে পাওয়ার চালু করুন এবং 'আইএনভি' এলইডি আলোকিত করে রিলে ক্লিক করুন কিনা তা পরীক্ষা করুন। যদি তা না হয় তবে পিকের 18 # পিনে ভোল্টেজটি পরীক্ষা করুন যা 5V হওয়ার কথা। যদি এটি অনুপস্থিত থাকে চেক উপাদান R37 এবং Q5, এর মধ্যে একটি ত্রুটিযুক্ত বা ভুলভাবে সংযুক্ত থাকতে পারে। যদি আপনি 'আইএনভি' এলইডিটি স্যুইচ না করে দেখতে পান, তবে পিকের 25 # পিনের ভোল্টেজ 5 ভি না কি তা পরীক্ষা করুন।
যদি উপরের পরিস্থিতিটি সাধারণভাবে সম্পাদিত হতে দেখা যায় তবে নীচে বর্ণিত পরবর্তী পদক্ষেপে যান।
3) পিআইসির অ্যাসিলোস্কোপ পরীক্ষা পিন # 13 পর্যায়ক্রমে ইনভার্টার সুইচটি চালু / বন্ধ করে আপনি এই পিনআউটটিতে প্রতিবার ইনভার্টার মেইনস ইনপুটটি অফ করা বন্ধ করে একটি ভাল মোডুলেটেড পিডব্লিউএম সিগন্যালটি দেখতে পাবেন বলে আপনি আশা করতে পারেন পিআইসিকে ত্রুটিযুক্ত বলে ধরে নিতে পারে, কোডিংটি সঠিকভাবে প্রয়োগ করা হয়নি বা আইসি খারাপভাবে সোল্ডার করেছে বা তার সকেটে inোকানো হয়েছে।
আপনি যদি এই পিনের উপর থেকে প্রত্যাশিত পিডাব্লুএমএম ফিড পেতে সফল হন তবে আইসির # 12 / # 14 এ পিন করুন এবং এই পিনগুলিতে 50Hz ফ্রিকোয়েন্সিটির উপলব্ধতা পরীক্ষা করুন, যদি পিক কনফিগারেশনের কোনও ত্রুটি চিহ্নিত না করে তবে সরান এবং এটা প্রতিস্থাপন করো. আপনি যদি এই পিনগুলিতে ইতিবাচক প্রতিক্রিয়া পেতে চান তবে নীচে বর্ণিত পরবর্তী পদক্ষেপে যান।
৪) পরবর্তী পদক্ষেপটি মোডুলেটেড পিডাব্লুএমএমগুলির জন্য আইসি ইউ 3 (সিডি 4081) এর পিন # 10 / পিন # 12 পরীক্ষা করা হবে যা শেষ পর্যন্ত মোসফেট ড্রাইভারের পর্যায়ে ইউ 1 এবং ইউ 2 এর সাথে একীভূত হয়। অতিরিক্তভাবে আপনাকে পিন # 9 / পিন # 12 এ প্রায় সম্ভাব্য পার্থক্যও পরীক্ষা করতে হবে যা আনুমানিক 3.4V-র মতো হতে পারে, এবং পিন # 8 / পিন # 13 তে 2.5V হতে যাচাই করা যেতে পারে। একইভাবে পিন # 10/11 কে 1.68V এ যাচাই করুন।
আপনি যদি সিডি 4081 আউটপুট পিনগুলি জুড়ে মডিউলড পিডাব্লুএম সনাক্ত করতে ব্যর্থ হন তবে আপনি পিসি থেকে আইসি সিডি 4081 এর প্রান্তিক পিনগুলিতে শেষ হওয়া ট্র্যাকগুলি যাচাই করতে বা কোনওভাবেই পিডব্লিউএমগুলিকে পৌঁছনো ইউ 3 থেকে বাধা দেওয়ার বিষয়টি যাচাই করতে চান would ।
যদি সবকিছু ঠিকঠাক হয় তবে আসুন পরবর্তী স্তরে চলে আসুন।
৫) এরপরে, ইউআর গেটের সাথে সিআরও সংযুক্ত করুন, ইনভার্টারটি চালু / বন্ধ করুন এবং উপরে করা হিসাবে PWM গুলি এই জায়গাগুলিতে যা এম 1 এবং এম 4, এবং এম 9, এম 12 গেটগুলি যাচাই করুন তবে পিডাব্লুএম যদি অবাক হন না এম 1 / এম 4 এর তুলনায় স্যুইচিংটি M9 / M12 পর্যায়ের বাইরে দেখা যায়, এটি সাধারণ।
যদি পিডব্লিউএমগুলি এই গেটগুলিতে সম্পূর্ণরূপে অনুপস্থিত থাকে তবে আপনি ইউ 1 এর # 11 পিনটি চেক করতে পারেন যা কম বলে আশা করা হচ্ছে, এবং যদি উচ্চতর দেখা যায় তবে বোঝা যাবে যে ইউ 1টি শাট-ডাউন মোডে চলমান।
এই পরিস্থিতিটি নিশ্চিত করতে ইউ 5 এর পিন # 2 এ ভোল্টেজ চেক করুন যা 2.5V এ হতে পারে এবং ইউ 5 এর স্বতন্ত্রভাবে পিন # 3 0V বা 1V এর নীচে হতে পারে, যদি এটি 1 ভি এর নীচে সনাক্ত করা থাকে, তবে এগিয়ে যান এবং আর 47 / আর 48 দেখুন, তবে যদি ভোল্টেজটি 2.5V এর উপরে থাকে তবে D11, D9, মোসফেট M9, M12 এবং এর আশেপাশের প্রাসঙ্গিক উপাদানগুলির সাথে স্থির সমস্যাটি সমাধানের জন্য, সন্তোষজনকভাবে সংশোধন না করে চেক করুন ..
যদি ইউ 1 এর পিন # 11 কম ধরা পড়ে এবং আপনি পিন # 1 থেকে PWM গুলি এবং U1 এর পিন # 7 খুঁজে পেতে অক্ষম হন তবে আইসি ইউ 1 প্রতিস্থাপনের সময় এসেছে, যা সম্ভবত সমস্যাটি সংশোধন করবে, যা নীচের পরবর্তী স্তরে যেতে আমাদের অনুরোধ জানাতে।
)) এখন মোসফেট অ্যারে এম 5 / এম 18 এবং এম 13 / এম 16 এর গেটগুলির জন্য ঠিক উপরে উল্লিখিত পদ্ধতিগুলি পুনরাবৃত্তি করুন, সমস্যা সমাধানের বিষয়টি যথাযথভাবে ব্যাখ্যা করা হবে তবে ইউ 2 এবং অন্যান্য পরিপূরক পর্যায়ের সাথে যা এই ম্যাসফেটগুলির সাথে সম্পর্কিত হতে পারে
)) উপরের পরীক্ষার এবং নিশ্চিতকরণ শেষ হওয়ার পরে, সাইনওয়েভ ইউপিএস সার্কিট ডায়াগ্রামে উল্লিখিত মোসফেট হিটিনসিংসের সাহায্যে ট্রান্সফরমার প্রাইমারিটি হুক করার অবশেষে এখন সময়। এটি একবার কনফিগার হয়ে গেলে, বৈদ্যুতিন সংকেতের মেরু বদল স্যুইচ করুন, আশা ইনভার্টারের আউটপুট টার্মিনাল জুড়ে প্রয়োজনীয় 220V নিয়ন্ত্রিত, ধ্রুবক সাইনওয়েভ এসি অ্যাক্সেস করতে প্রিসেট ভিআর 1 সামঞ্জস্য করুন adjust
যদি আপনি আউটপুটটি এই মানটি অতিক্রম করে বা এই মানের নীচে এবং প্রত্যাশিত নিয়ন্ত্রণটি অকার্যকর দেখতে পান তবে আপনি নিম্নলিখিত বিষয়গুলি সন্ধান করতে পারেন:
যদি আউটপুটটি অনেক বেশি হয়, পিআইসি-র পিন # 3 যা ভোল্টেজ 2.5V-তে অনুমান করা হচ্ছে তা পরীক্ষা করুন, যদি না হয় তবে ইনভার্টার ট্রান্সফর্মার থেকে সংযোগকারী সিএন 4 তে প্রাপ্ত প্রতিক্রিয়া সংকেতটি যাচাই করুন, সি 40 এর আরও ভোল্টেজ চেক করুন এবং নিশ্চিত করুন ইস্যু সংশোধন না হওয়া অবধি R58, VR1 ইত্যাদি উপাদানগুলির যথার্থতা।
8) এটি বৈদ্যুতিন সংকেতের মেরু বদল করার জন্য একটি উপযুক্ত বোঝা সংযুক্ত করার পরে, এবং নিয়ন্ত্রণ পরীক্ষা করুন, একটি 2 থেকে 3 শতাংশ ভাঁজ স্বাভাবিক হিসাবে বিবেচনা করতে পারে, যদি আপনি এখনও কোনও নিয়ন্ত্রণ ব্যর্থ হন, তবে ডায়োডগুলি D23 ---- D26 চেক করুন, আপনি তার একটি আশা করতে পারেন এগুলি ত্রুটিযুক্ত হতে পারে বা আপনি সমস্যাটি সংশোধন করার জন্য C39, C40 প্রতিস্থাপনের চেষ্টা করতে পারেন।
9) উপরের পদ্ধতিগুলি সফলভাবে শেষ হয়ে গেলে, আপনি নিম্ন-বিএটিটি কার্যকারিতা যাচাই করে চালিয়ে যেতে পারেন। উপাদানটির দিক থেকে একজোড়া ট্যুইজারের সাহায্যে এই সংক্ষিপ্ত সার্কিট R54 ব্যবহার করে দেখুন, যা তাত্ক্ষণিকভাবে লো-বাট এলইডি আলোকিত করতে এবং বুজারকে প্রতি বীপের হারে প্রায় 9 সেকেন্ডের জন্য বীপ দিতে অনুরোধ করবে দ্বিতীয় প্রায়
উপরেরটি না ঘটলে আপনি পিআইসির পিন # 4 টি যাচাই করতে পারেন যা সাধারণত 2.5V এর উপরে হওয়া উচিত এবং এর চেয়ে কম যে কোনও কিছু কম সতর্কতার ইঙ্গিত দেয়। এখানে যদি অপ্রাসঙ্গিক ভোল্টেজের মাত্রা ধরা পড়ে তবে R55 এবং R54 সঠিক কাজের ক্রমে রয়েছে কিনা তা পরীক্ষা করে দেখুন।
10) পরবর্তী এটি ওভারলোড ট্রিপিং বৈশিষ্ট্য হবে যা নিশ্চিত হওয়া দরকার need পরীক্ষার জন্য আপনি লোড হিসাবে একটি 400 ওয়েট ভাস্বর আলো নির্বাচন করতে পারেন এবং এটি বৈদ্যুতিন সংকেতের মেরু বদল আউটপুট সাথে সংযুক্ত করতে পারেন। ভিআর 2 সামঞ্জস্য করে ওভারলোড ট্রিপিং প্রিসেট ঘূর্ণনের কোনও সময়ে শুরু করা উচিত।
সুনির্দিষ্টভাবে বলতে গেলে, পিআইসির পিন # 7 এ ভোল্টেজটি পরীক্ষা করুন যেখানে সঠিক লোডের অবস্থার অধীনে ভোল্টেজ 2V এর বেশি হবে এবং এই স্তরের উপরে যে কোনও কিছুই ওভারলোড কাট-অফ ক্রিয়াকে ট্রিগার করবে।
৪০০ ওয়াটের একটি নমুনা সহ প্রিসেটটি ভিন্ন করে দেখুন ওভারলোড কাট-অফ শুরু করার জন্য জোর করে দেখুন, যদি এটি না ঘটে তবে ইউ 5 (এলএম324) এর পিন # 14 এ ভোল্টেজ যাচাই করুন, যদি না হয় তবে 2.2V এর চেয়ে বেশি হবে তারপরে আর 48, আর 49, আর 50 এবং এছাড়াও R33 দেখুন যে কোনওটিই ত্রুটিযুক্ত হতে পারে, যদি এখানে সবকিছু ঠিক থাকে তবে কেবল ইউ 5 কে একটি নতুন আইসি দিয়ে প্রতিস্থাপন করুন এবং প্রতিক্রিয়াটি পরীক্ষা করুন।
বিকল্পভাবে আপনি আর 48 মান প্রায় 470K বা 560 কে বা 680 কে ইত্যাদিতে বাড়িয়ে দেখতে চেষ্টা করতে পারেন এবং এটি সমস্যার সমাধান করতে সহায়তা করে কিনা তা পরীক্ষা করে দেখতে পারেন।
১১) ইনভার্টার প্রসেসিংয়ের মূল্যায়ন সমাপ্ত হলে, মেইন চেঞ্জওভারের সাথে পরীক্ষা করুন in ইনভার্টার মোডে মোড স্যুইচটি রাখুন (সিএন 1 টি উন্মুক্ত রাখুন) ইনভার্টারটি সুইড-অন করুন, মেইন তারকে ভ্যারিয়াকটিতে হুক আপ করুন, ভ্যারিয়েট ভোল্টেজটি আপ করুন 140 ভি এসি এবং মেইন চেঞ্জওভার ট্রিগারটি ট্রিগারটি ঘটে কিনা তা পরীক্ষা করে দেখুন। যদি আপনি কোনও পরিবর্তন পরিবর্তন না পেয়ে মাইক্রোকন্ট্রোলারের পিন 2 এ ভোল্টেজ নিশ্চিত করেন তবে এটি> 1.24V হওয়া দরকার, যদি ভোল্টেজ 1.24V এর চেয়ে কম হয় তবে সেন্সিং ট্রান্সফর্মার ভোল্টেজ (তার মাধ্যমিকের 6V এসি) পরীক্ষা করুন বা একবার দেখুন R57, R56 উপাদানগুলিতে।
এখন যে পরিবর্তনটি ভেরিয়াক ভোল্টেজটি স্ক্রিনটি 90V এর নীচে দেখায় এবং মেইন-টু-ইনভার্টার চেঞ্জওভার অ্যাকশনটি প্রতিষ্ঠিত কিনা তা পরীক্ষা করে দেখায়। পরিবর্তনটি হওয়া উচিত কারণ এখন থেকে মাইক্রোকন্ট্রোলারের পিন 2 এ ভোল্টেজ 1 ভি এর চেয়ে কম is
12) উপরের মূল্যায়ন শেষ হওয়ার পরে, ইউপিএস মোডে মেইন-চেঞ্জওভার নিয়ে পরীক্ষা করুন। ইউপিএস মোডে মোড-স্যুইচ সক্ষম করুন (সিএন 1 সংক্ষিপ্ত রাখুন) ইনভার্টার শুরু করুন, বৈদ্যুতিন তারের সাথে বৈকল্পিকের সাথে সংযুক্ত করুন, ভেরিয়েট ভোল্টেজকে প্রায় 190V এসিতে বৃদ্ধি করুন এবং ইউপিএস-টু-মেইন চেঞ্জওভার স্ট্রাইক পর্যবেক্ষণ করুন বা না। যদি কোনও পরিবর্তন পরিবর্তন না হয় তবে কেবল মাইক্রোকন্ট্রোলারের পিন 2 এ ভোল্টেজটি একবার দেখুন, এটি 1.66V এর বেশি হওয়া দরকার, যতক্ষণ ভোল্টেজ 1.66V এর চেয়ে কম থাকে তারপরে কেবল সেন্সিং ট্রান্সফর্মার ভোল্টেজটি নিশ্চিত করুন (তার মাধ্যমিকের 6V এসি) ) বা সম্ভবত R57, R56 উপাদানগুলি পরীক্ষা করুন।
চেঞ্জওভার পপ আপ হওয়ার ঠিক পরে, ভ্যারিয়েট ভোল্টেজটি 180 ভি তে স্কেল করুন এবং মেইন টু-ইউপিএস চেঞ্জওভার আসে কিনা তা সন্ধান করুন। পরিবর্তনটি এখন থেকে হরতাল করা উচিত যেহেতু মাইক্রোকন্ট্রোলারের পিন 2 এ ভোল্টেজ 1.5V এর বেশি হতে পারে।
13) অবশেষে সংযুক্ত ব্যাটারির কাস্টমাইজড চার্জটি একবার দেখুন। ইনভার্টার-মোডে মোড স্যুইচটি ধরে রাখুন, মেইনগুলি পরিচালনা করুন এবং ভ্যারিয়েট ভোল্টেজকে 230V এসি তে বাড়িয়ে দিন এবং চার্জিং কারেন্টটি নির্ধারণ করুন যা এমমিটারে মসৃণভাবে উত্থিত হওয়া উচিত।
চার্জ কারেন্টের সাথে পৃথক পৃথক ভিআর 3 দিয়ে ফলল, যাতে বর্তমানের প্রকরণটি প্রায় 5-এম্পি থেকে 12/15-এম্পের মাঝামাঝি সময়ে পরিবর্তিত হতে পারে।
কেবলমাত্র যদি চার্জিংয়ের বর্তমানটিকে অনেক বেশি দেখা যায় এবং পছন্দসই স্তরে ছোট করার মতো অবস্থানে না হয় তবে আপনি R51 এর মান বাড়িয়ে 100 কে এবং / বা যদি এখনও চার্জিংয়ের প্রত্যাশিত স্তরে উন্নতি না করে দেখতে পারেন তারপরে সম্ভবত আপনি R51 এর মান হ্রাস করার চেষ্টা করতে পারেন 22 কে, দয়া করে মনে রাখবেন যে একবার মাইক্রোকন্ট্রোলারের পিন 5 এ অনুভূত সমতুল্য ভোল্টেজ 2.5V এ পরিণত হয় এবং মাইক্রোকন্ট্রোলার পিডাব্লুএম নিয়ন্ত্রণ করতে পারে এবং ফলস্বরূপ চার্জিং কারেন্টের প্রত্যাশা করা যেতে পারে।
চার্জিং মোডের সময় মনে রাখবেন যে এমওএসএফইটিগুলির নীচের শাখাটি (এম 6-এম 12 / এম 13 - এম 16) অবশ্যই 8 কেএচজেডে স্যুইচ করছে যখন এমওএসএফইটিগুলির উপরের শাখাটি বন্ধ রয়েছে।
14) অতিরিক্তভাবে আপনি ফ্যানটির ক্রিয়াকলাপটি পরীক্ষা করতে পারবেন, প্রতিটি বার ইনভার্টার চালু থাকাকালীন ফ্যান চালু থাকে এবং যখনই ইনভার্টারটি অফ থাকে তখন ফ্যানটিকে স্যুইচড অফ দেখা যায়। একই পদ্ধতিতে চার্জ চালু হওয়ার সাথে সাথে ফ্যান চালু থাকে এবং চার্জিং বন্ধ হয়ে গেলে ফ্যান বন্ধ হয়ে যায়
পূর্ববর্তী: ব্যাটারি শর্ত এবং ব্যাকআপ পরীক্ষার জন্য ব্যাটারি স্বাস্থ্য পরীক্ষক সার্কিট পরবর্তী: 3 সহজ ক্যাপাসিটিভ প্রক্সিমিটি সেন্সর সার্কিট অনুসন্ধান করা