এই পোস্টে আমরা বিএলডিসি মোটর কী তা তদন্ত করি এবং পরবর্তীকালে আমরা একটি সেন্সরবিহীন বিএলডিসি মোটর ড্রাইভার সার্কিটের নকশা সম্পর্কে শিখি।
বিএলডিসি সিপিইউ ভক্তরা
সিপিইউ, ভোল্টেজ স্ট্যাবিলাইজারস, ডিভিডি প্লেয়ার এবং অন্যান্য অনুরূপ সরঞ্জামগুলিতে সেই দ্রুত চলমান অনুরাগীরা দেখেছেন, যা সর্বনিম্ন দক্ষতার সাথে কাজ করে, ন্যূনতম স্থান গ্রহণ করে, বর্তমান এবং এখনও নির্দিষ্ট সরঞ্জামগুলির জন্য নির্ধারিত গুরুত্বপূর্ণ ক্রিয়াকলাপ সরবরাহ করতে সক্ষম হয়?
হ্যাঁ, এগুলি বিএলডিসির সমস্ত আধুনিক সংস্করণ বা ব্রাশহীন ডিসি মোটর যা পুরানো traditionalতিহ্যবাহী ব্রাশ মোটরগুলির চেয়ে অনেক বেশি উন্নত।

চিত্র সৌজন্যে: https://en.wikedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
তবে একটি বিএলডিসি মোটরের একটি পরিশীলিত ড্রাইভার সার্কিটের প্রয়োজন হবে, এবং হ্যাঁ এই সমস্ত সিপিইউ অনুরাগীর মধ্যে এই ড্রাইভার মডিউলগুলি অন্তর্নির্মিত রয়েছে, যদিও এটি একটি সাধারণ ডিসি ব্যবহার করে সহজেই চালিত প্রদর্শিত হয়, অভ্যন্তরীণভাবে সিস্টেমটি ইতিমধ্যে একটি স্মার্ট সার্কিটের সাথে লাগানো হয়েছে।
বিএলডিসি মোটর চালক
এখানে আমরা এমন একটি স্মার্ট বিএলডিসি মোটর ড্রাইভার সার্কিট সম্পর্কে শিখব, কোনও ছোট বিএলডিসি মোটর অবিশ্বাস্য দক্ষতার সাথে চালানোর জন্য একটি সিঙ্গল চিপ ডিআরভি 10963 ব্যবহার করে এবং পরবর্তী একটি নিবন্ধে আমরা দেখব যে কীভাবে এই আইসি সার্কিট ড্রাইভিংয়ের জন্যও আপগ্রেড করা হতে পারে শক্তিশালী উচ্চ বর্তমান বিএলডিসি যেমন এর মতো কোয়াডকপ্টারগুলিতে ব্যবহৃত হয়।
তবে এর আগে বিএলডিসি মোটর সম্পর্কে কিছুটা শিখতে আকর্ষণীয় হবে।
ব্রাশযুক্ত এবং ব্রাশহীন ডিসি মোটরগুলির মধ্যে পার্থক্য
ব্রাশযুক্ত মোটর এবং ব্রাশহীন মোটর এবং দক্ষতার হারের মধ্যে পার্থক্য বরং সুস্পষ্ট।
যেহেতু ব্রাশ মোটরগুলি ক্ষত আর্চারটি নিজেই চুম্বকের মাঝে চলতে থাকে, তাই 'ব্রাশ' (ঘষে ফেলা যোগাযোগগুলি) নিয়োগ করতে হয় যাতে চলন্ত কয়েল টার্মিনালগুলি সরবরাহের উত্সে পৌঁছে না গিয়ে ধারাবাহিকভাবে সরবরাহের ভোল্টেজ গ্রহণ করতে সক্ষম হয়, যা অন্যথায় তৈরি করবে অসম্ভব কাজ করে এবং অপারেশনগুলিকে বিপদে ফেলে।
ব্রাশহীন মোটরে, কুণ্ডলী বা ঘুরানো কখনই চলমান হয় না এবং ধ্রুবক হয়, এখানে রটার স্থায়ী চৌম্বকগুলির একটি সেট বহন করে এবং পার্শ্ববর্তী ঘুরার চৌম্বকীয় প্রবাহের প্রভাবে ঘোরানো।
যেহেতু চৌম্বকটি সমস্ত ঝামেলা থেকে মুক্ত, এবং ক্ষমতা পরিচালনার জন্য বা টার্মিনালগুলিকে জড়িত না করে কাজ করতে সক্ষম, এটি একটি অনায়াসে দ্রুত গতিতে এবং কার্যত একটি নিরব স্তরে ঘুরতে পারে।
কিন্তু এখানে একটি ধরা আছে। স্থায়ী চৌম্বকের ফ্লাক্সকে বৈদ্যুতিন চৌম্বক প্রতিক্রিয়া জানাতে, চৌম্বকীয় পর্যায়ে বা খুঁটির একটি ধ্রুবক স্থানান্তর হওয়া দরকার, যাতে দুটি প্রতিপক্ষ ক্রমাগত প্রতিক্রিয়া করতে এবং একটি বিরোধী শক্তির মধ্য দিয়ে যেতে সক্ষম করে যার ফলে প্রয়োজনীয় টর্জনিয়াল ফোর্সকে ছাড়িয়ে যায় রটার এবং ফলাফল টর্ক সঙ্গে ঘূর্ণন সঞ্চালন।
একটি ব্রাশ মোটরে, আর্মার কয়েলটির স্ব-সামঞ্জস্য প্রকৃতির কারণে এটি আরও সহজ হয়ে যায় যা কোনও চৌম্বকীয় বিরোধী বিপরীত বিরোধী চৌম্বকীয় শক্তি ঘোরানো এবং তৈরি করতে সক্ষম হয় এবং কোনও বাহ্যিক ডাল বা প্রক্রিয়াজাতকরণের প্রয়োজন ছাড়াই ঘোরাতে পারে।
তবে একটি বিএলডিসিতে এটি একটি সমস্যা হয়ে যায় কারণ চৌম্বক রটারটি 'ক্লুলেস' থেকে যায় এবং অর্থহীন উপায়ে ঘোরার জন্য হাফিজার্ড পদ্ধতিতে না ঘুরতে ঘুরতে একটি গণনাযুক্ত চৌম্বকীয় কমান্ডের প্রয়োজন হয়।
ঠিক এ কারণেই সমস্ত বিএলডিসি মোটর মোটরটির অভ্যন্তরে তিনটি পৃথক বাতাসের স্বতন্ত্র সেটগুলি কমান্ড করার জন্য বাধ্যতামূলকভাবে মোটর ড্রাইভার সার্কিটের প্রয়োজন হয়।
সুতরাং সমস্ত বিএলডিসি মূলত 3-পর্বের মোটর এবং রোটরে ঘূর্ণন টর্কের উত্পাদন জন্য বাধ্যতামূলকভাবে 3 টি পর্যায় প্রয়োজন।
সেন্সরলেস বিএলডিসি ড্রাইভাররা কী করে
সেন্সর কম বিএলডিসির ড্রাইভার সার্কিটটি কেবল একটি অনুক্রমিক পদ্ধতিতে ঘুরানোর 3 টি সেটকে বৈদ্যুতিকভাবে বৈদ্যুতিন করে তোলে যাতে চৌম্বকীয় রটার একটি ধারাবাহিক বিরোধী শক্তির মধ্য দিয়ে যেতে সক্ষম হয় মোটরটিকে একটি টেকসই টর্ক এবং ঘূর্ণন বল সম্পাদন করতে সক্ষম করে।
কিন্তু সার্কিট দ্বারা বিএলডিসির বাতাসের এই ধারাবাহিক শক্তিটি কেবল এলোমেলোভাবে সেট করা যায় না, এটি টেন্ডেম বা রটার চুম্বকের ঘূর্ণন অবস্থার প্রতিক্রিয়া হিসাবে থাকতে হবে, অন্যথায় বাস্তবায়নটি হাইওয়াইরে যেতে পারে এবং আমরা মোটর শ্যাফ্টটি প্রত্যক্ষ করতে পারি। ) অচলভাবে ঘোরানো, এটি কোনও বুদ্ধিমান ঘোরার সাথে ঘড়ির কাঁটা এবং একটি অ্যান্টিক্লোকের মধ্যে ঝাঁকুনি দিচ্ছে।
বিএলডিসি মোটরগুলিতে কেন সেন্সর ব্যবহার করা হয়
অতএব, আমরা অনেক বিএলডিসি মোটর ভেরিয়েন্টের ভিতরে অবস্থিত সেন্সরগুলি প্রবর্তন করি, এই সেন্সরগুলি (সাধারণত হল এফেক্ট সেন্সরগুলি) রটার চুম্বকের চৌম্বক মেরুগুলির পরিবর্তিত অবস্থান 'বোঝে', সংযুক্ত প্রসেসরের সার্কিটকে বৈকল্পিক বৈদ্যুতিক বিদ্যুতায়িত করতে এবং একটি ঘূর্ণন আন্দোলন সম্পাদন করতে নির্দেশ দেয় একটি অনুকূল টর্ক সঙ্গে।
হল এফেক্ট সেন্সরগুলি বেশিরভাগ বিএলডিসি মোটরগুলিতে কার্যকরভাবে নিযুক্ত করা হয় যা আকারে তুলনামূলকভাবে বড়, তবে সিপিইউ অনুরাগীদের মধ্যে যেমন সিপিইউ ড্রাইভ, ডিভিডি প্লেয়ার, ছোট এক্সস্টোস্ট ভক্তদের মধ্যে, কোয়াডকপ্টারগুলিতে ব্যবহৃত মোটরগুলির জন্য, হল এফেক্ট সেন্সরগুলি অনুপযুক্ত হয়ে উঠতে পারে এবং তাই কোনও বিকল্প সেন্সর কম পদ্ধতির প্রয়োগ করা হয়।
এর মধ্যে বাতাসের সহজাত ব্যাক EMF বিদ্যুতের শোষণ জড়িত যা প্রক্রিয়াকরণ এবং ঘূর্ণায়মান টর্কের সঞ্চালনের প্রাসঙ্গিক সেটগুলিকে বৈদ্যুতিককরণের জন্য উত্স উত্স হিসাবে গ্রহণ করা হয়।

একটি বিএলডিসির রটার মুভমেন্ট সিমুলেট করা
উপরের অপরিশোধিত সিমুলেশনে আমরা কল্পনা করতে পারি যে রিলিজড ব্যাক ইএমএফটিকে কীভাবে রেফারেন্স হিসাবে গ্রহণ করা হয় এবং পরবর্তী স্থির বাতাসের স্যুটগুলির জন্য সিকোয়েন্সিং ডাল উৎপাদনের জন্য ব্যবহৃত হয়, কেন্দ্রীয় স্থায়ী চৌম্বক রটারের উপর একটি ঘূর্ণন টর্ক লাগিয়ে। সিমুলেশনটি হুবহু প্রতিরূপ হতে পারে না তবুও এটি কার্যনির্বাহী সম্পর্কে একটি মোটামুটি ধারণা দেয়।
মজার আকর্ষণীয় বিষয় যে চৌম্বকটির এন / এস যখন ঘূর্ণন ঘূর্ণনের মূল কেন্দ্রে থাকে তখন পালসটি স্যুইচ করা হয়, যা স্পন্দিত করে নাড়ি মেরুটির উপর নির্ভর করে N বা S হিসাবে উত্সাহিত করে এবং আকর্ষণীয় এবং প্রতিরোধের উত্পাদন করে এন / এস চৌম্বকগুলিকে বল প্রয়োগ করুন, যার ফলে সর্বোচ্চ সম্ভাব্য স্তরে প্রয়োজনীয় টর্ক তৈরি করা হবে।
এবং এটি পূর্ববর্তী উইন্ডিংয়ের স্যুইচিংয়ের মাধ্যমে ব্যাক EMF প্রকাশের কারণে ঘুরে দেখা যায়।
উপরের আলোচনাটি সেন্সর কম বিএলডিসি মোটরের কাজকে স্পষ্ট করে, এখন আসুন শিখি যে একটি নির্দিষ্ট সার্কিট কীভাবে 3 ফেজ স্যুইচিংয়ের উপরের জটিল সম্পাদন পরিচালনা করে
বিএলডিসি ড্রাইভার DRV10963
কিছুটা গুগলিংয়ের পরে আমি এই সংবেদকবিহীন বিএলডিসি ড্রাইভার সার্কিটটি একটি একক চিপ ডিআরভি 10963 ব্যবহার করে দেখতে পেয়েছি যা কনফিগারেশনে नगणিত পরিমাণে অংশ নিয়োগ করে এবং তবুও উদ্দিষ্ট কর্মের জন্য একটি পরিশীলিত প্রক্রিয়াজাতকরণ কার্যকর করতে সক্ষম।
ডিআরভি 10963 একটি অত্যাধুনিক চিপ যা বিশেষত সেন্সর কম বিএলডিসি মোটর পরিচালনা করার জন্য ডিজাইন করা হয়েছে কেবল মোটর উইন্ডিংয়ের পিছনে ইএমএফের প্রত্যাশা করে এবং ঘুরার উপরে একটি সুনির্দিষ্ট কমান্ড সরবরাহ করে এবং রটারের উপর একটি সর্বোত্তম ঘূর্ণন টর্কটি সম্পন্ন করে।
বর্তনী চিত্র

উপরের চিত্রটি সার্কিটের সরল বিন্যাসটি দেখায় যা দৃশ্যত আইসি ব্যতীত অন্য কিছুই অন্তর্ভুক্ত করে না।
বাহ্যিক উত্স থেকে নির্দিষ্ট ডেটা দিয়ে কেবল প্রাসঙ্গিক পিনআউটগুলি খাওয়ানোর মাধ্যমে বিভিন্ন পিনআউটগুলি মোটরটির পিডাব্লুএম স্পিড কন্ট্রোল, দিকনির্দেশ নিয়ন্ত্রণ ইত্যাদি নির্দিষ্ট ফাংশনগুলি সম্পাদনের জন্য বরাদ্দ করা হয়।
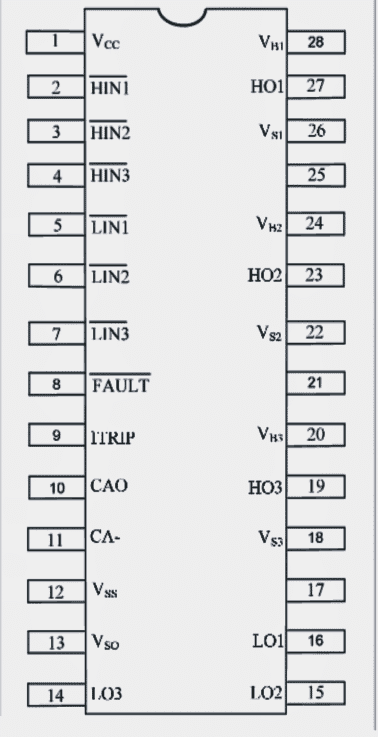
নিম্নলিখিত চিত্রটি চিপের প্যাকেজটি দেখায়, যা দেখতে 10 পিন ডিআইএল আইসির মতো লাগে, চিত্রটির নীচে সজ্জিত তথ্য থেকে একই রকমের বিভিন্ন পিনআউট ফাংশনগুলি অধ্যয়ন করা যেতে পারে:

প্রস্তাবিত সেন্সরলেস বিএলডিসি ড্রাইভার সার্কিটের সার্কিট ডায়াগ্রামের কথা উল্লেখ করে পূর্ববর্তী নিবন্ধ এবং উপরে চিপ চিত্র উপস্থাপন হিসাবে, পিনআউট বিশদ নীচের হিসাবে বোঝা যেতে পারে:
আইসি পিনআউট বিশদ
এফজি = এটি মোটর স্পিড ইন্ডিকেটর পিন (আউটপুট), যা অভ্যন্তরীণ বিজেটি সহ একটি উন্মুক্ত সংগ্রাহক মোডে অনড়িত।
ওপেন সংগ্রাহক ইঙ্গিত করে যে এই পিনআউটে আউটপুটটি উন্মুক্ত সংগ্রাহক এবং গ্রাউন্ডে ডুবে যাওয়া যুক্তির মাধ্যমে নেতিবাচক পিডাব্লুএমগুলি উত্পাদন করবে, সুতরাং বৈধ পাঠ্য পেতে ব্যবহারকারীকে এই উন্মুক্ত সংগ্রাহক এবং পজিটিভ সরবরাহ (5 ভি) জুড়ে একটি পুল আপ প্রতিরোধক সংযুক্ত করতে হবে will ) এই পিনআউটটিতে গতির ইঙ্গিতটি সম্পন্ন করার জন্য
এফজিএস = এটি স্পিড ইন্ডিকেটর সিলেক্টর ইনপুট, মানে ইন্ডিকেটর পিন এফজি সুইচিং / অফ করার জন্য এখানে লজিক উচ্চ বা নিম্ন প্রমাণিত হতে পারে।
ভিসি = আইসিটিকে পরিচালনা করতে সক্ষম করার জন্য ইতিবাচক সরবরাহ, অবশ্যই 5 ভি ছাড়িয়ে যাবে না।
ডাব্লু, ইউ এবং ভি হ'ল বিএলডিসি মোটরের 3-পর্বের আউটপুট যা এই আইসি এর মাধ্যমে পরিচালিত হওয়ার কথা। এটি মোটর কয়েলগুলির প্রয়োজনীয় সিঙ্ক্রোনাইজড স্যুইচিংয়ের জন্য মোটর ইএমএফ ডালগুলি সংবেদনের জন্য ইনপুটগুলির মতো কাজ করে।
জিএনডি = ভিডিডি পিনের সাথে আইসি-র নেতিবাচক সরবরাহ পিনআউটকে বোঝায়।
এফআর = মোটরটির দিক বাছাই বা নির্দেশ করতে সহায়তা করে এবং সিস্টেম চালিত হওয়ার পরে যে কোনও সময় গতিশীল পরিবর্তন হতে পারে, কেবলমাত্র বাহ্যিক যুক্তিকে উচ্চ বা লজিক নিম্ন প্রবর্তন করে।
PWM = এটি একটি থেকে PWM নিয়ন্ত্রণ ইনপুটকে বোঝায় sign বাহ্যিক PWM তরঙ্গরূপ জেনারেটর।
সংযুক্ত বিএলডিসি মোটরের কাঙ্ক্ষিত গতি নিয়ন্ত্রণের জন্য এই পিডাব্লুএম ইনপুটটি পরিবর্তনশীল হতে পারে।
চিপের কেন্দ্রস্থলে ডটেড স্পেসটি তাপ প্যাডকে নির্দেশ করে, যা সম্ভবত ভারী বিএলডিসি মোটর ব্যবহারের সময় চিপের উপরে সম্ভাব্য তাপ উত্পাদন ডুবানোর জন্য একটি হিটসিংক দিয়ে চাপানো বা চাপতে পারে।
উপরোক্ত আলোচনাটি সেন্সরলেস বিএলডিসি মোটর ড্রাইভার চিপ ডিআরভি 10963 এর পিনআউট বা সংযোগের বিশদটি জানিয়েছে, এখন নীচের পয়েন্টগুলির সাহায্যে চিপের অভ্যন্তরীণ কনফিগারেশন এবং কার্যকারিতা বিশদভাবে বিশ্লেষণ করা যাক:
যন্ত্রের বিবরণ
DRV10963 একটি 3 ফেজ সেন্সরহীন বৈদ্যুতিক মোটর অপারেটর অন্তর্নির্মিত শক্তি MOSFETs (3-পর্যায়ে এইচ-ব্রিজযুক্ত) সহ। এটি উচ্চ উত্পাদনশীলতা, হ্রাস শব্দ এবং ন্যূনতম মাধ্যমিক উপাদান গণনা মোটর ড্রাইভ ফাংশনগুলির জন্য উপযুক্ত। এক্সক্লুসিভ সেন্সরবিহীন উইন্ডো-আইস 180 ° সাইনোসয়েডাল ম্যানেজমেন্ট স্কিম শব্দ-মুক্ত মোটর যাত্রা দক্ষতা সরবরাহ করে।
সুরক্ষিত কর্মক্ষমতা অর্জনের জন্য পরিপূরক অন্তর্নির্মিত সুরক্ষা সার্কিটগুলির সাথে একত্রে রেখে একটি স্মার্ট লক সনাক্তকরণ কার্যকারিতা নিয়ে তৈরি ডিআরভি 10963। DRV10963 একটি তাপযুক্ত মাদুরের সাথে তাপীয় দক্ষ 10- পিন ইউএসএন প্যাকিংয়ে পাওয়া যাবে।
আইসি কীভাবে কাজ করে
DRV10963 প্রোডাক্টটি 3 পর্বের সংবেদনহীন মোটর অপারেটর যার সাথে ইনফিউজড পাওয়ার মোসফেটগুলি রয়েছে, এটি
উচ্চতর পারফরম্যান্স, হ্রাস অনুনাদ এবং ন্যূনতম পৃষ্ঠপোষক অংশ গণনা মোটর ড্রাইভ ফাংশন জন্য বিশেষত তৈরি।
মূল সেন্সরবিহীন উইন্ডো-কম 180-সাইনোসয়েডাল নিয়ন্ত্রণ পরিকল্পনা বৈদ্যুতিকভাবে উত্তেজিত টর্ক রিপল নামমাত্র বজায় রেখে নিরব মোটর কার্যকারিতা উপস্থাপন করে। আরম্ভের পরে, DRV10963 ডিভাইসটি এফআর ইনপুট পিনের মাধ্যমে নির্দিষ্ট কোর্সে মোটরটি চালু করবে।
ডিআরভি 10963 চিপ সাইনোসয়েডাল নিয়ন্ত্রণ পরিকল্পনার ব্যবহার করে একটি 3 পর্বের বিএলডিসি মোটর তৈরি করতে চলেছে।
নিযুক্ত সাইনোসয়েডাল ফেজ ভোল্টেজের তাত্পর্য পিডাব্লুএম পিনের দায়িত্ব চক্রের উপর নির্ভর করে। মোটরটি চলার সময়, DRV10963 আইসি এফজি পিনের গতিবেগের ডেটা সরবরাহ করে।
DRV10963 ইউনিট একটি স্মার্ট লক ইন্দ্রিয় ক্ষমতা নিয়ে গঠিত। মোটরটি বহিরাগত চাপের কারণে মোটর আটকে যাওয়ার মতো ইভেন্টে, প্রোগ্রামটি লকিং সমস্যাটি সনাক্ত করতে চলেছে এবং মোটর সহ নিজেই সুরক্ষার ব্যবস্থা গ্রহণ করবে।
লক সেন্সির সার্কিটের বিশেষ পদ্ধতিটি লক সনাক্তকরণে বিশদভাবে চিত্রিত হয়েছে। ডিআরভি 10৯63 IC আইসি এছাড়াও বর্তমান সুরক্ষা, ওভার ভোল্টেজ সুরক্ষা, ভোল্টেজ সুরক্ষার অধীনে এবং তাপমাত্রা সুরক্ষার উপরে একাধিক অন্তর্নির্মিত সুরক্ষা সার্কিট অন্তর্ভুক্ত করে।
চরিত্রগত ব্যাখ্যা
গতি ইনপুট এবং নিয়ন্ত্রণ
ডিআরভি 10963 3-ফেজ 25-কেএল-এলজেড পিডাব্লুএম আউটপুট উপস্থাপন করে যা পর্যায় থেকে পর্যায় পর্যন্ত সাইনোসয়েডাল ওয়েভফর্মগুলির একটি মান শতাংশ হতে পারে। যদি কোনও চক্র স্থলভাগের ক্ষেত্রে নির্ধারিত হয় তবে সনাক্ত করা তরঙ্গরূপটি চিত্র 2-এ দেখানো হিসাবে তৃতীয় অর্ডার সুরেলা সংশ্লেষের সাথে মিলিত একটি PWM সুরক্ষিত সাইনোসয়েড হতে পারে।

এই কোডিং কৌশলটি চালকের স্পেসিফিকেশনগুলি এই কারণেই প্রবাহিত করে যে সম্ভবত প্রায়শই এক ধাপের আউটপুট থাকে যা শূন্যের সাথে সমান হতে পারে।
সরবরাহ প্রশস্ততা ভোল্টেজ (ভিসিসি) এবং বাধ্যতামূলক পিডাব্লুএম ডিউটি চক্র (পিডাব্লুএম) অনুযায়ী সমীকরণ 1 এ সংজ্ঞায়িত এবং চিত্র 3-তে হাইলাইট অনুযায়ী পরিবর্তিত হয় নির্দেশিত পিডাব্লুএম শুল্ক চক্রটি 100 পার্সেন্ট হয়ে গেলে সর্বোত্তম প্রশস্ততা কার্যকর করা হয়।
ভিএফপিপি = পিডাব্লুএমডিসি>

মোটরটির জন্য ব্যবহৃত হবে এমন পর্বের ভোল্টেজগুলির প্রশস্ততা নিয়ন্ত্রণ করার জন্য PWM অর্ডার ব্যবহারের মাধ্যমে মোটর গতি নিয়ন্ত্রণ করা হয় না।
পিডব্লিউএম ইনপুট শুল্ক চক্রটি 9 বিট ডিজিটাল পরিমাণে (0 থেকে 511 পর্যন্ত) পরিবর্তিত হয়েছে।
নিয়ন্ত্রণের রেজোলিউশনটি 1/512 == 0.2%। শুল্ক চক্র বিশ্লেষক ইনপুট শুল্ক চক্র এবং 9 বিট ডিজিটাল চিত্রের মধ্যে একটি প্রাথমিক অর্ডার এক্সচেঞ্জ অপারেশনকে সহায়তা করে।
চিত্র 4 এ এটি হাইলাইট করা হয়েছে, যার মধ্যে r = 80 এমএস।

পিডব্লিউএম অর্ডার করা শুল্ক চক্রের সাথে আউটপুট সর্বাধিক প্রশস্ততা ডিআরভি 10963 ডিভাইসে পরিবর্তনশীল between
ফলাফল সর্বোচ্চ প্রশস্ততা সমীকরণ 1 দ্বারা আলোচনা করা হয় যখন পিডাব্লুএম কমান্ড> ন্যূনতম কার্যকারিতা শুল্ক। সর্বনিম্ন অপারেশন শুল্ক চক্রটি সম্ভবত ওটিপি সেটিং (এমআইএনওপি_ডিসি 1: 0) দ্বারা সম্ভবত 13%, 10%, 5% বা কোনও বিধিনিষেধে প্রতিষ্ঠিত হয়।
সারণী 1 ন্যূনতম অপারেশন শুল্ক চক্রের জন্য প্রস্তাবিত কনফিগারেশনগুলি প্রদর্শন করে।
যখনই পিডব্লিউএম নির্দেশিত শুল্ক চক্র সর্বনিম্ন কার্যকারিতা শুল্কের চেয়ে কম এবং 1.5% এর বেশি হয়, তখন আউটপুটটি ন্যূনতম অপারেশন শুল্ক চক্রের নিয়ন্ত্রিত হতে চলেছে। ইনপুট শুল্ক চক্র 1.5% এর অধীনে যে কোনও সময়, ডিআরভি 10963 ডিভাইস সম্ভবত আউটপুটটি পরিচালনা করবে না এবং স্ট্যান্ডবাই মোডে প্রেরণ করা হবে।
চিত্র 6 এ চিত্রিত করা যেতে পারে।

ঘূর্ণমান কনফিগারেশন
DRV10963 চিত্র 7 তে সূক্ষ্মভাবে বিশদ বিশদযুক্ত একটি প্রযুক্তির মাধ্যমে মোটরটি শুরু করবে।

মোটর ইনিশিয়ালাইজেশন গ্রাফে লুপ চেঞ্জওভার সীমা (HOW।) বন্ধ করার জন্য, সময় সারিবদ্ধ (TAHQH), এবং ত্বরণ হার (RACE) এর জন্য ওপেন লুপের ডিভাইস কনফিগারযোগ্য বিকল্প রয়েছে।
পরিবহণ যুক্তিতে রটারকে সীমাবদ্ধ করতে ডিআরভি 10963 একই সময়ে জিএনডি-তে নিয়ন্ত্রন পর্ব ইউতে পর্যায়ক্রমে ভি এবং ডাব্লুতে একটি x% শুল্কচক্র কার্যকর করে।
এই দৃশ্যটি TAIign সেকেন্ডের জন্য স্থায়ী। এক্স বিভিন্ন তাত্পর্যপূর্ণ ভোল্টেজের উপর পর্যাপ্ত রোটেশনাল টর্কে বজায় রাখার জন্য ভিসিসি ভোল্টেজ (টেবিল 2 তে দেখানো হয়েছে) দ্বারা x% তাত্পর্য চিহ্নিত করা হয়েছে।
প্রান্তিককরণটি ক্রমটি সম্পাদন করার সাথে সাথে, মোটরটি টেবিল 2-এ বর্ণিত শৃঙ্খলাবদ্ধ স্তরের সাইনোসয়েডাল ফেজ ভোল্টেজ স্থাপন করে এবং গতিবেগের স্তরটি হোমে বৃদ্ধি না হওয়া অবধি আরএসিই দ্বারা প্রতিনিধিত্ব করে একটি বিস্তৃত হারে পরিবহণ পরিসীমা দ্বারা উত্সাহিত করে গতিতে বাধ্য করা হয় ।, হার্জেড
এই সীমাটি পৌঁছানোর সাথে সাথেই ডিআরভি’এল ০৯63৩ ক্লোজড লুপ মোডে রূপান্তরিত করে যার মাধ্যমে কম্যুয়েশন ড্রাইভ অগ্রগতি অন্তর্নির্মিত নিয়ন্ত্রণ অ্যালগরিদম দ্বারা স্বীকৃত হয় এবং কর্মরত ভোল্টেজ পিডাব্লুএম বাধ্যতামূলক শুল্ক চক্র ইনপুট দ্বারা চিহ্নিত হয়।
লুপ চেঞ্জওভার সীমা (হোম), সারিবদ্ধ সময় (টিএইচকিউএইচ) এবং এক্সিলারেট রেট (আরএসিই) বন্ধ করার ওপেন লুপটি ওটিপি কনফিগারেশনের মাধ্যমে কনফিগারযোগ্য।
হ্যান্ডঅফ থ্রেশহোল্ডের নির্বাচন (HOW,) সাধারণত পরীক্ষা এবং ত্রুটি মূল্যায়নের মাধ্যমে অনুমোদিত হয়। উদ্দেশ্য হ্যান্ডঅফ সহনশীলতা পছন্দ করা যা সামান্যতম সম্ভব এবং এটি মোটরটিকে অনায়াসে এবং বিশ্বস্ততার সাথে উন্মুক্ত লুপ ত্বরণ এবং বদ্ধ লুপ ত্বরণের মধ্যে পরিবর্তন করতে সক্ষম করে change
সাধারণভাবে বর্ধিত গতির মোটর (সর্বাধিক গতি) উন্নত গতির মোটরগুলি কেটি কমেছে তাই আরও সাশ্রয়ী মূল্যের BEMF এর কারণে একটি উচ্চতর হ্যান্ডঅফ সহনশীলতা প্রয়োজন।
সারণী 3 হ্যান্ডঅফ সহনশীলতার জন্য কনফিগারযোগ্য পছন্দগুলি প্রদর্শন করে। বৈদ্যুতিক হার্জেডের সর্বাধিক গতি নির্দিষ্ট জমা দেওয়ার জন্য পছন্দসই হ্যান্ডঅফ গতিটি বেছে নেওয়ার ক্ষেত্রে সহায়তা করার জন্য একটি রেফারেন্স হিসাবে প্রমাণিত।

প্রান্তিককরণের সময় (টিএইচকিউএইচ) এবং ত্বরণ হারের (আরএসিইই) পছন্দ এমনকি পরীক্ষা এবং ত্রুটি পরীক্ষার ক্ষেত্রেও আক্রমণাত্মক হতে পারে।
বৃহত্তর জড়তা সহ মোটরগুলি সাধারণত একটি দ্রুততর ত্বরণ শতাংশের সাথে একসাথে একটি ব্রিফার সারিবদ্ধ সময় দাবি করে এমন কম জড়তা সহ মোটরগুলির বিপরীতে সাধারণত একটি বর্ধিত সারিবদ্ধ সময় এবং আরও সুগঠিত গতির হারের দাবি করে। পিরিয়ড ঘোরার বিপরীতে লঞ্চ স্থায়িত্বকে মূলধন করতে প্রোগ্রাম ট্রেড অফগুলি প্রয়োগ করা দরকার।
টিআই সর্বাধিক পরিপূরণ হারের সমর্থনে টর্ক আপ আপোমে আপোস করার জন্য কম তীব্র কনফিগারেশনগুলি (ধীর আরএসিই এবং উল্লেখযোগ্য টিমাইন) নিয়ে সিদ্ধান্ত নিয়ে সমীক্ষা করে।
সরঞ্জামগুলি আন্তরিকতার সাথে সম্পাদন করার বিষয়টি নিশ্চিত হওয়ার সাথে সাথে অতিরিক্ত শক্তিশালী কনফিগারেশনগুলি (বৃহত্তর আরএপিসি এবং আরও কম টিএইচকিউএইচ) ব্যবহারের মুহুর্তটি হ্রাস করতে এবং একই সাথে সতর্কতার সাথে পরিপূর্ণতার হারের উপর নজর রাখতে ব্যবহার করা যেতে পারে।
টেবিল 4 টিএজি, এবং আরএসিই এর জন্য কনফিগারযোগ্য সেটিংস প্রদর্শন করে।

এই সেন্সরবিহীন বিএলডিসি আইসি সম্পর্কিত ব্যাখ্যার বাকী অংশটি সজ্জিত এই মূল ডেটাশিটে
উপরোক্ত আলোচিত সেন্সরলেস বিএলডিসি মোটর ড্রাইভার সার্কিটের বিশদ সম্পর্কিত আরও জানতে দয়া করে নির্দ্বিধায় জানুন
পূর্ববর্তী: 12 ভি এলইডি ব্যাকপ্যাক পাওয়ার সাপ্লাই সার্কিট পরবর্তী: এমসিইউ ছাড়াই কোয়াডকপ্টার রিমোট কন্ট্রোল সার্কিট