পোস্টটি একটি কার্যকর পিডব্লিউএম মোটর সফট স্টার্ট সার্কিটের ব্যাখ্যা দেয় যা একটি ভারী মোটরকে একটি নরম শুরু দিয়ে সক্ষম করার জন্য ব্যবহার করা যেতে পারে এবং এইভাবে বিপজ্জনক উচ্চ স্রোত আঁকা থেকে সরঞ্জামগুলি আটকাতে পারে।
কেন একটি সফট স্টার্ট
উচ্চ ওয়াটেজ মোটর যেমন পাম্প মোটর বা ভারী শিল্পের মোটরগুলির অন্যান্য ধরণের প্রারম্ভিক পাওয়ার স্যুইচ অন চলাকালীন প্রচুর স্রোত আঁকতে থাকে, যার ফলে সম্পর্কিত ফিউজগুলি এবং সুইচগুলি প্রভাবিত হয় যার ফলে এগুলি ওভারটাইমকে ঘা বা কমিয়ে দেয়। পরিস্থিতির প্রতিকারের জন্য একটি সফট স্টার্ট সার্কিট অত্যন্ত আবশ্যক হয়ে ওঠে।
আমার আগের কয়েকটি প্রবন্ধে আমরা সম্পর্কিত বিষয় নিয়ে আলোচনা করেছি, যা আপনি নিম্নলিখিত পোস্টগুলির মাধ্যমে বিস্তৃতভাবে শিখতে পারেন:
পাম্প মোটর জন্য নরম শুরু সার্কিট
রেফ্রিজারেটরগুলির জন্য সফট স্টার্ট সার্কিট
যদিও উপরের ডিজাইনগুলি বেশ কার্যকর, এগুলি তাদের পদ্ধতির সাথে কিছুটা কম প্রযুক্তি হিসাবে বিবেচিত হতে পারে।
এই নিবন্ধে আমরা দেখতে পাব কীভাবে প্রক্রিয়াটি আরও পরিশীলিত ব্যবহার করে বাস্তবায়িত হতে পারে পিডাব্লুএম ভিত্তিক মোটর সফট স্টার্ট কন্ট্রোলার সার্কিট।
পিডব্লিউএম কনসেপ্ট ব্যবহার করে
এখানে ধারণাটি প্রতিবার চালু হওয়ার সময় মোটরটিতে ধীরে ধীরে বর্ধমান পিডাব্লুএম প্রয়োগ করা হয়, এই ক্রিয়াটি মোট নির্দিষ্ট সময়কালের মধ্যে শূন্য থেকে সর্বোচ্চে রৈখিক বর্ধন গতি অর্জন করতে দেয়, যা সামঞ্জস্যযোগ্য হতে পারে।

দ্রষ্টব্য: দয়া করে একক বিসি 57 এর পরিবর্তে আইসি 2 এর পিন # 5 এ একটি ডার্লিংটন বিসি 547 কনফিগারেশন ব্যবহার করুন। এটি একটি একক বিসি 57 এর তুলনায় আরও কার্যকর প্রতিক্রিয়া তৈরি করবে
সফ্ট স্টার্ট সহ একটি চলক 48V মোটর নিয়ামকের জন্য সার্কিটের উদাহরণ

## গ্রাউন্ডে আইসি 2 এর পিন 5 থেকে একটি 1K কানেক্ট করুন, যা উপরের নকশায় ভুল দেখা যাচ্ছে না ##
কিভাবে এটা কাজ করে
উপরের চিত্রটি উল্লেখ করে, লিনিয়ারলি ইনক্রিমেন্টিং পিডব্লিউএম উত্পাদন দুটি 555 আইসি এর সাহায্যে অর্জন করা হয়, তাদের স্ট্যান্ডার্ড পিডব্লিউএম মোডে কনফিগার করা হয়।
আমি ইতিমধ্যে আমার পূর্ববর্তী একটি নিবন্ধে ব্যাখ্যাটি ধারণাটি বিস্তারিতভাবে আলোচনা করেছি PWM উত্পাদনের জন্য আইসি 555 কীভাবে ব্যবহার করবেন।
ডায়াগ্রামে দেখা যেতে পারে, কনফিগারেশনে দুটি 555 আইসি নিয়োগ করা হয়েছে, আইসি 1 আশ্চর্যরকমের মতো তারযুক্ত, আর আইসি 2 তুলনাকারী হিসাবে।
আইসি 1 একটি নির্দিষ্ট ফ্রিকোয়েন্সিতে প্রয়োজনীয় ক্লক সংকেত তৈরি করে (আর 1 এবং সি 2 এর মান দ্বারা নির্ধারিত) যা আইসি 2 এর # 2 পিনে প্রয়োগ করা হয়।
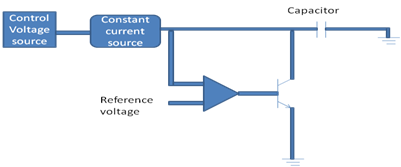
আইসি 2 তার পিন # 7 জুড়ে ত্রিভুজ তরঙ্গ উত্পন্ন করতে ক্লক সংকেত ব্যবহার করে, যাতে এগুলি তার নিয়ন্ত্রণ ভোল্টেজ পিন # 5 এ উপলব্ধ সম্ভাবনার সাথে তুলনা করতে পারে।
পিন # 5 একটি এনপিএন এর মাধ্যমে প্রয়োজনীয় নিয়ন্ত্রণ ভোল্টেজ অর্জন করে নির্গমনকারী অনুসরণকারী পর্যায়ে টি 2 এবং সম্পর্কিত উপাদানগুলির সাহায্যে তৈরি।
যখন পাওয়ারটি চালু থাকে, তখন টি 2 কে র্যাম্পিং বা ধীরে ধীরে ক্রমবর্ধমান ভোল্টেজ দিয়ে তার বেসে R9 এর মাধ্যমে খাওয়ানো হয় এবং সি 5 এর আনুপাতিক চার্জের কারণে।
এই র্যাম্পিং সম্ভাব্যতাটি সঠিকভাবে তার সংগ্রহকারীর সরবরাহ ভোল্টেজের সাথে টি 2 এর প্রেরকটি জুড়ে যথাযথভাবে নকল করা হয়, যার অর্থ বেস ডেটা শূন্য থেকে প্রায় সরবরাহের ভোল্টেজ স্তর পর্যন্ত ধীরে ধীরে বর্ধমান সম্ভাবনায় রূপান্তরিত হয়।
আইসি 2 এর পিন # 5 এ এই র্যাম্পিং ভোল্টেজটি তাত্ক্ষণিকভাবে আইসি 2 এর পিন # 7 জুড়ে উপলব্ধ ত্রিভুজ তরঙ্গের সাথে তুলনা করা হয়, যা আইসি 2 এর পিন # 3 এ লিনিয়ারালি ইনক্রিমেন্টিং পিডব্লিউএম অনুবাদ করে translated
সি 5 পুরোপুরি চার্জ না হওয়া এবং টি 2 এর বেস স্থিতিশীল ভোল্টেজের স্তর অর্জন না হওয়া পর্যন্ত পিডব্লিউএমগুলির লিনিয়ারલી ইনক্রিমেন্টিং প্রক্রিয়াটি চলতে থাকে।
উপরোক্ত ডিজাইনটি প্রতিবার বিদ্যুৎ চালু হওয়ার সাথে সাথে পিডব্লিউএম উত্পাদনের যত্ন নেয়।
ভিডিও ক্লিপ:
নিম্নলিখিত ভিডিওটিতে 24V ডিসি মোটর উপরোক্ত PWM সার্কিটের বাস্তব পরীক্ষার ফলাফল দেখানো হয়েছে। ভিডিওতে মোটরটির সার্কিটের পিডাব্লুএম পট সামঞ্জস্য প্রতিক্রিয়া দেখানো হয়েছে, এবং অতিরিক্ত ব্যাটারি সূচক এলইডি প্রতিক্রিয়াও মোটরটি চালু এবং বন্ধ করা হয় ।
শূন্য ক্রসিং ট্রায়াক নিয়ামককে সংহত করে
PWM মোটর বাস্তবায়নের জন্য নরম শুরু সার্কিট প্রভাব , আইসি 2 এর পিন # 3 থেকে আউটপুটটি একটি ট্রায়াক পাওয়ার ড্রাইভার সার্কিটে প্রয়োগ করা প্রয়োজন, যা নীচে দেখানো হয়েছে:

উপরের চিত্রটি দেখায় যে কীভাবে স্যুইচ অন সফট স্টার্ট পিডাব্লুএম নিয়ন্ত্রণ নিয়ন্ত্রণের উদ্দেশ্যে ভারী মোটরগুলিতে প্রয়োগ করা যেতে পারে।
উপরের চিত্রটিতে আমরা দেখতে পাই যে শূন্য ক্রসিং ডিটেক্টর সহ ট্রায়াক ড্রাইভার ড্রাইভার বিচ্ছিন্নভাবে একটি নরম শুরু প্রভাব কার্যকর করার জন্য লিনিয়ারলি ইনক্রিমেন্টিং পিডব্লিউএম দিয়ে মোটর চালানোর জন্য নিযুক্ত করা যেতে পারে।
উপরোক্ত ধারণাটি কার্যকরভাবে একক পর্বের মোটরগুলিতে ওভারকন্টেন্ট অবস্থান শুরু করার যত্ন নেয়।
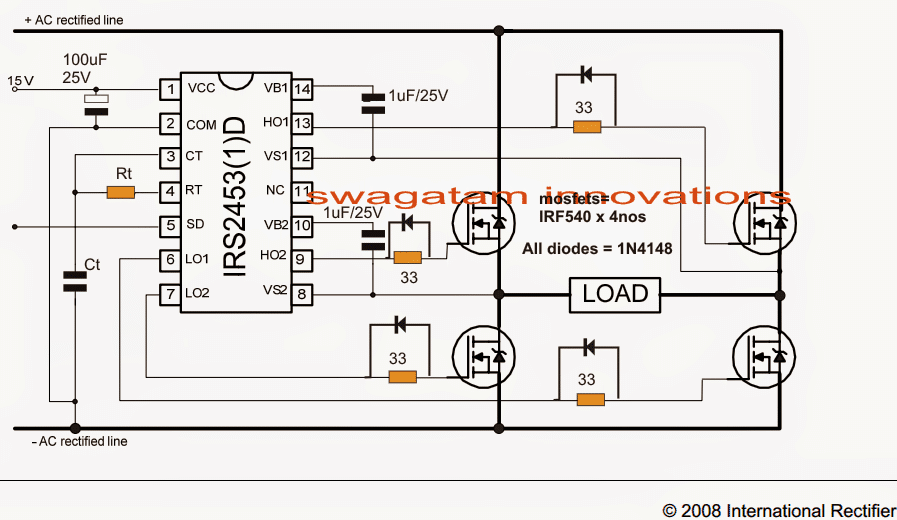
তবে যদি 3 ফেজ মোটর ব্যবহার করা হয় তবে মোটরগুলিতে প্রস্তাবিত 3 ধাপের সফট স্টার্ট বাস্তবায়নের জন্য নিম্নলিখিত ধারণাটি ব্যবহার করা যেতে পারে।

পূর্ববর্তী: এলএম 3915 ব্যবহার করে উপরে / ডাউন এলইডি সূচক পরবর্তী: উচ্চ ফ্রিকোয়েন্সি সনাক্তকরণ ব্যবহার করে কীভাবে কুকুর বারিং প্রিভেন্টার সার্কিট তৈরি করবেন