একটি পিক এবং প্লেস রোবট হ'ল যা কোনও জিনিস বাছাই করতে এবং এটি পছন্দসই জায়গায় স্থাপন করতে ব্যবহৃত হয়। এটি একটি নলাকার রোবট হতে পারে যা অনুভূমিক, উল্লম্ব এবং ঘূর্ণমান অক্ষগুলিতে চলন সরবরাহ করে, একটি গোলাকার রোবট দুটি ঘূর্ণমান এবং একটি লিনিয়ার চলন সরবরাহ করে, একটি আঞ্চলিক রোবট বা একটি স্কারা রোবট (3 টি উল্লম্ব অক্ষের ঘূর্ণন বাহু সহ স্থির রোবট)।
সুবিধাদি
আরও সরানোর আগে, আসুন রোবটগুলি বাছাই এবং রাখার কেন কয়েকটি কারণ দেখি:
- তারা দ্রুত এবং তাদের মানব অংশের তুলনায় কয়েক সেকেন্ডে কাজটি করতে পারে।
- এগুলি নমনীয় এবং উপযুক্ত নকশা রয়েছে।
- তারা সঠিক।
- এগুলি কাজের পরিবেশের সুরক্ষা বাড়ায় এবং কখনই ক্লান্ত হয় না।
একটি পিক এন প্লেস রোবোটের অংশগুলি

এন প্লেস রোবট চয়ন করুন
আসুন দেখি পিক এবং প্লেস রোবোট আসলে কী নিয়ে থাকে:
- রোভারকে : এটি একটি সিলিন্ডার বা গোলক, জয়েন্টগুলি এবং লিঙ্কগুলির মতো বেশ কয়েকটি অনড় দেহের সমন্বয়ে গঠিত রোবোটের প্রধান সংস্থা। এটি ম্যানিপুলেটর হিসাবেও পরিচিত।
- শেষ প্রভাবক : এটি রোভারের শেষ যৌথের সাথে সংযুক্ত দেহ যা গ্রিপিং বা অবজেক্টগুলি পরিচালনা করার উদ্দেশ্যে ব্যবহৃত হয়। এটি মানুষের বাহুতে সাদৃশ্য হতে পারে।
- অভিনেতা : তারা রোবটের চালক। এটি আসলে রোবটকে কার্যকর করে তোলে। এটি সার্ভো মোটর, স্টিপার মোটর বা বায়ুসংক্রান্ত বা হাইড্রোলিক সিলিন্ডারের মতো কোনও মোটর হতে পারে।
- সেন্সরগুলি: সম্পূর্ণরূপে রোবটটি সুবিন্যস্তভাবে কাজ করে তা নিশ্চিত করার জন্য এগুলি অভ্যন্তরীণ পাশাপাশি বাহ্যিক অবস্থা অনুধাবন করতে ব্যবহৃত হয়। সেন্সরগুলিতে টাচ সেন্সর, আইআর সেন্সর ইত্যাদি জড়িত
- নিয়ামক : এটি সেন্সর প্রতিক্রিয়ার উপর ভিত্তি করে অ্যাকিউটিউটরগুলিকে নিয়ন্ত্রণ করতে এবং এইভাবে প্রতিটি এবং প্রতিটি যৌথের গতি এবং অবশেষে শেষ তদন্তকারীটির গতি নিয়ন্ত্রণ করার জন্য ব্যবহৃত হয়।
বেসিক পিক এন প্লেস রোবোটের কাজ:
এর মূল কাজ a রোবোট বাছাই এবং রাখুন এটি এর জয়েন্টগুলি দ্বারা সম্পন্ন হয়। জোড়গুলি মানব জয়েন্টগুলির সাথে সাদৃশ্যযুক্ত এবং রোবোটটিতে টানা দুটি অনমনীয় সংস্থায় যোগদান করতে ব্যবহৃত হয়। এগুলি রোটারি জয়েন্ট বা লিনিয়ার জয়েন্ট হতে পারে। কোনও রোবটের যে কোনও লিঙ্কে একটি সংযুক্ত যুক্ত করতে, আমাদের সেই দেহের অংশের জন্য স্বাধীনতার ডিগ্রি এবং গতিবিধির ডিগ্রি সম্পর্কে জানতে হবে। স্বাধীনতার ডিগ্রিগুলি দেহের রৈখিক এবং আবর্তনশীল চলাচল বাস্তবায়ন করে এবং আন্দোলনের ডিগ্রিগুলি বোঝায় যে দেহটি যে পরিমাণ অক্ষরেখায় চলতে পারে।

একটি সাধারণ পিক এন প্লেস রোবট
একটি সরল পিক এবং প্লেস রোবট দুটি চলমান বেসে দুটি দৃ bodies় দেহ নিয়ে গঠিত হয়, যা ঘূর্ণন জয়েন্টের সাথে একত্রে সংযুক্ত থাকে। একটি ঘূর্ণমান জয়েন্ট এমন এক যা কোনও কোনও অক্ষের চারদিকে 360 ডিগ্রি ঘূর্ণন সরবরাহ করে।
- নীচের বা বেসটি চাকার সাথে সংযুক্ত থাকে যা রৈখিক গতিবিধি সরবরাহ করে।
- ঘস্ট্যান্ডঅনমনীয় বডি স্থির করে দেওয়া হয় এবং দ্বিতীয় অনমনীয় শরীরকে সমর্থন করে যেখানে শেষের তদন্তকারী সরবরাহ করা হয়।
- ২এনডিঅনমনীয় শরীরটি সমস্ত 3 টি অক্ষরে চলাচল সরবরাহ করে এবং 3 ডিগ্রি স্বাধীনতা অর্জন করে। এটি 1 এর সাথে সংযুক্ত রয়েছেস্ট্যান্ডএকটি ঘূর্ণন জয়েন্ট সঙ্গে শরীর।
- উপাদানটির সমস্ত দিকে পৌঁছানোর জন্য, কোনও উচ্চতায় অবস্থান নিতে, শেষের ছাপটির স্বাধীনতার সমস্ত 6 ডিগ্রি সমন্বিত করা উচিত।
সামগ্রিকভাবে, বেসিক পিক অ্যান্ড প্লেস রোবোটটি নিম্নলিখিত হিসাবে কাজ করে:
- বেসের নীচের চাকাগুলি রোবটটিকে পছন্দসই জায়গায় নিয়ে যেতে সহায়তা করে।
- শেষ বর্ধককে সমর্থনকারী অনমনীয় শরীরটি যেখানে অবজেক্টটি স্থাপন করা হয়েছে সেখানে পৌঁছানোর জন্য বাঁকিয়ে বা সোজা করে।
- শেষ ইফেক্টরটি দৃ strong়ভাবে গ্রিপ সহ বস্তুটি তুলে নেয় এবং এটিকে পছন্দসই স্থানে রাখে।
এখন যেহেতু আমরা পিক ও প্লেস রোবোট সম্পর্কে একটি সংক্ষিপ্ত ধারণা পেয়েছি, মূল প্রশ্নটি এটি আসলে কীভাবে নিয়ন্ত্রণ করা হয় is
একটি সাধারণ পিক এবং প্লেস রোবট এর শেষ প্রভাবকের চলন নিয়ন্ত্রণ করে নিয়ন্ত্রণ করা যায়। গতিটি হাইড্রোলিক গতি ব্যবহার করতে পারে, অর্থাৎ ড্রাইভের রোবোটের চাপের মধ্যে জলবাহী তরল ব্যবহার করে, বা বায়ুসংক্রান্ত গতি ব্যবহার করে, অর্থাৎ যান্ত্রিক গতির কারণ হিসাবে চাপযুক্ত বায়ু ব্যবহার করে। তবে সবচেয়ে কার্যকর উপায় হ'ল মোটর ব্যবহার করে প্রয়োজনীয় গতি সরবরাহ করে। রোবট এবং শেষ এফেক্টরটিকে প্রয়োজনীয় গতি সরবরাহ করার জন্য মোটরগুলিকে নিয়ন্ত্রণ করতে হবে।
একটি পিক এন প্লেস রোবোট নিয়ন্ত্রণের কার্যকারিতা
কীপ্যাডে কয়েকটি বোতামের সাহায্যে রোবট নিয়ন্ত্রণ করা যায় কীভাবে? হ্যা এটা সম্ভব! কেবলমাত্র প্রয়োজনীয় বাটনটি টিপে, আমরা আমাদের কাজটি অর্জনের জন্য এটি কোনও দিক থেকে সরানোর জন্য রোবটকে কমান্ড প্রেরণ করতে পারি। তাছাড়া এটি সাধারণ ওয়্যারলেস যোগাযোগ ব্যবহার করে অর্জন করা যেতে পারে।
আসুন দেখুন এটি কীভাবে কাজ করে:
ট্রান্সমিটার অংশটি মাইক্রোকন্ট্রোলারের সাথে ইন্টারফেস করা কিপ্যাড নিয়ে গঠিত। দশমিক বিন্যাসে যে কোনও বোতাম নম্বর মাইক্রোকন্ট্রোলার দ্বারা 4 ডিজিটের বাইনারিতে রূপান্তরিত হয় এবং এর কোনও একটি বন্দরে সমান্তরাল আউটপুট এনকোডারটিতে প্রয়োগ করা হয়। এনকোডার এই সমান্তরাল ডেটাটিকে সিরিয়াল ডেটাতে রূপান্তর করে এবং এটি ট্রান্সমিটারকে খাওয়ানো হয়, সিরিয়াল তথ্য প্রেরণের জন্য অ্যান্টেনা লাগানো হয়।

ব্লক চিত্রটি একটি পিক এন প্লেস রোবোটের ট্রান্সমিটার দেখায়
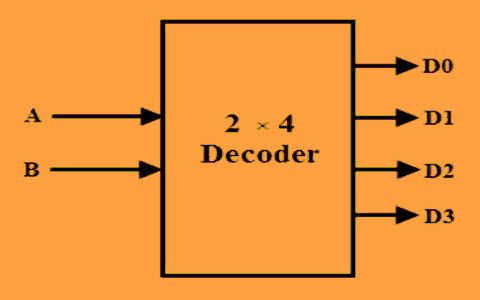
রিসিভার দিকটি মাইক্রোকন্ট্রোলারের সাথে ইন্টারফেসযুক্ত একটি ডিকোডার নিয়ে থাকে। ডিকোডারটি সিরিয়াল বিন্যাসে প্রাপ্ত কমান্ডটিকে সমান্তরাল রূপে রূপান্তর করে এবং এই ডেটা মাইক্রোকন্ট্রোলারকে দেয়। এই আদেশের উপর ভিত্তি করে মাইক্রোকন্ট্রোলার মোটর চালকদের সংশ্লিষ্ট মোটর চালানোর জন্য উপযুক্ত ইনপুট সংকেত প্রেরণ করে।

ব্লক ডায়াগ্রাম পিক এন প্লেস রোবোটের রিসিভার দেখাচ্ছে Showing
পুরো রোবোটকে গতি সরবরাহ করার জন্য এবং বাহু গতি সরবরাহ করার জন্য দুটি আরও মোটর সমন্বিত সিস্টেমটিতে দুটি মোটর রয়েছে। এন্ড ইফেক্টর বা গ্রিপারকে বস্তুটিকে কার্যকরভাবে পরিচালনা করার জন্য যথাযথ চাপ প্রয়োগ করার জন্য এটি সরবরাহ করার জন্য নিয়ন্ত্রণ করা দরকার নরম গ্রিপ । যথাযথ কমান্ডের মাধ্যমে আর্ম মোটরগুলি নিয়ন্ত্রণ করে এটি নিশ্চিত করা হয়। আর্ম মোটর থেকে আউটপুট একটি 10 ওহিএম / 2 ডাবল প্রতিরোধকের সাথে সংযুক্ত থাকে এবং মোটর ওভার লোড বা লক শর্তের সময়, একটি উচ্চ ভোল্টেজ প্রতিরোধকের জুড়ে বিকাশ করা হয়, যা অপটোসোলিটরের আউটপুট এবং যুক্ত বাধাকে যুক্তি উচ্চ স্তরের কারণ করে পিএনপি ট্রানজিস্টারের মাধ্যমে অপ্টিজোলটর আউটপুটটিতে সংযুক্ত মাইক্রোকন্ট্রোলারের পিনটি লজিক লো সিগন্যাল পায়, যা গ্রিপারের অন্যান্য সমস্ত ক্রিয়াকলাপ বন্ধ করে দেয়।
সুতরাং সাধারণ আরএফ যোগাযোগের মাধ্যমে, আমরা আসলে একটি পিক এবং প্লেস রোবট নিয়ন্ত্রণ করতে পারি।
বাছাই এবং স্থান রোবটের ব্যবহারিক প্রয়োগসমূহ:
- প্রতিরক্ষা অ্যাপ্লিকেশন : এটি নজরদারি করার জন্য এবং বোমার মতো ক্ষতিকারক জিনিস বাছাই করতে এবং সেগুলি নিরাপদে ছড়িয়ে দিতে ব্যবহার করা যেতে পারে।
- শিল্প অ্যাপ্লিকেশন : এই রোবটগুলি উত্পাদন করতে ব্যবহৃত হয়, প্রয়োজনীয় অংশগুলি বাছাই করতে এবং যন্ত্রপাতি ফিক্সিং সম্পূর্ণ করার জন্য এটি সঠিক অবস্থানে রাখে। এটি কনভেয়ার বেল্টে অবজেক্টগুলি রাখার পাশাপাশি কনভেয়ার বেল্ট থেকে ত্রুটিযুক্ত পণ্যগুলি তুলতেও ব্যবহৃত হতে পারে।
- চিকিত্সা অ্যাপ্লিকেশন : এই রোবটগুলি বিভিন্ন সার্জিকাল অপারেশনে যেমন যৌথ প্রতিস্থাপন অপারেশন, অর্থোপেডিক এবং অভ্যন্তরীণ অস্ত্রোপচার অপারেশনে ব্যবহার করা যেতে পারে। এটি আরও নির্ভুলতা এবং নির্ভুলতার সাথে অপারেশনগুলি সম্পাদন করে।
এই অ্যাপ্লিকেশনগুলি বাদে, এই রোবটগুলি মানবজাতির জন্য উপযুক্ত অন্যান্য বিভিন্ন অ্যাপ্লিকেশনগুলিতেও ব্যবহার করা যেতে পারে।
এখন প্রশ্নটি রয়ে গেছে- যে দিনটি রোবটগুলি পুরোপুরি মানুষের জন্য সহজতর করতে চলেছে?