নিবন্ধের এই অংশে আমরা বৈদ্যুতিক গাড়িগুলিতে প্যাডেল প্রেস মেকানিজমকে যথাযথভাবে পৃথক বৈদ্যুতিক সংকেতে রূপান্তরিত করার একটি উদ্ভাবনী পদ্ধতি সম্পর্কে শিখি, যা আরও গাড়ির গতি নিয়ন্ত্রণের প্রক্রিয়া করার জন্য ব্যবহৃত হতে পারে।
বর্ণিত ধারণাটি একটি বৈদ্যুতিন এক্সিলাররের মতো কাজ করবে যা প্যাডেলটি ধীরে ধীরে চাপ দিলে গাড়ির গতি রৈখিকভাবে বাড়িয়ে তুলবে, এবং বিপরীতে, পিডব্লিউএম প্রযুক্তি ব্যবহার করে
এই ধারণাটি অনুরোধ করেছিলেন জনাব লোকেশ মাইনি
প্রযুক্তিগত বিবরণ
আমি একজন যান্ত্রিক লোক, বর্তমানে বৈদ্যুতিন গাড়িতে কাজ করছি এবং আমি প্যাডেল ব্যবহার করে আমার মোটরের গতি নিয়ন্ত্রণ করতে চাই। আমি আমার মোটরের জন্য একটি নিয়ামক পাচ্ছি না দয়া করে আমাকে নিজের তৈরি করতে আমাকে সহায়তা করুন আমি খুব বেশি থাকব
কৃতজ্ঞ
মোটর স্পেসিফিকেশন হ'ল 36 ভোল্ট, 43 এম্প এবং 1.5hp ব্রাশড ডিসি মোটর।
মেকানিকাল ডিজাইন
একটি প্যাডেল ত্বকের একটি বৈদ্যুতিন সংস্করণ প্রাথমিকভাবে প্রথমে প্যাডেলের যান্ত্রিক চাপটিকে যথাযথভাবে পরিবর্তিত বৈদ্যুতিক সংকেতে রূপান্তরিত করার জন্য একটি প্রক্রিয়া প্রয়োজন, যাতে এই সংকেতটির ব্যবহারিক গতি নিয়ন্ত্রণে কাঙ্ক্ষিত রূপান্তরকরণের জন্য সিগন্যাল প্রসেসরের পর্যায়ে প্রক্রিয়া করা যায় the যানবাহন
অনেকগুলি ধারণার চেষ্টা করা যেতে পারে যেমন পাইজো লোড সেন্সর, একটি ক্যাপাসিটিভ লোড সেন্সর, একটি অনুরণন সংবেদক দ্বারা ইত্যাদি ব্যবহার করে article এই নিবন্ধে আমরা অনেকগুলি সহজ পদ্ধতিটি শিখব যা একই অর্জনের জন্য একটি এলইডি / এলডিআর সমাবেশকে অন্তর্ভুক্ত করে me ।

উপরের চিত্রটিতে প্রদর্শিত ইলেক্ট্রোমেকানিকাল বিন্যাসে আমরা নিম্নলিখিত সংহত উপাদানগুলি দেখতে সক্ষম হয়েছি:
একটি স্ক্রু প্রক্রিয়া যুক্ত একটি ছোট গিয়ার।
একটি সাদা মাদুর প্রতিচ্ছবিযুক্ত পৃষ্ঠযুক্ত স্ক্রুটির মাথা
স্ক্রু মাথার সামনে অবস্থিত একটি এলইডি / এলডিআর সমাবেশ।
প্রস্তাবিত প্রক্রিয়াটি কীভাবে কাজ করে।
উপরের চিত্রটিতে প্রদর্শিত গিয়ারটি অন্য গিয়ারের সাথে অনুপাতযুক্ত লক করতে হবে যা এই গিয়ারের চেয়ে 10 গুণ বেশি হতে পারে।
বড় গিয়ারটি প্যাডাল প্রক্রিয়াটির সাথে এমনভাবে কনফিগার করা দরকার যে এটি প্যাডেল টিপানোর প্রতিক্রিয়া হিসাবে একটি ঘূর্ণমান আন্দোলন শুরু করে।
গিয়ারগুলি থেকে আবর্তিত প্রতিক্রিয়া ঘুরে ফিরে এলইডি / এলডিআর অ্যাসেম্বলি অবস্থিত চেম্বারের দিকে স্ক্রু হেডের একটি সামনের গতি তৈরি করে।
প্রক্রিয়াটি এলইডিআর দ্বারা প্রাপ্ত এলইডি থেকে আনুপাতিকভাবে প্রতিফলিত আলোর পরিমাণের কারণ ঘটবে।
পেডাল হতাশার সাথে সম্পর্কিত এই বিবিধ ডেটা (নির্দিষ্ট আকারের প্রতিরোধের আকারে) নির্দিষ্ট গাড়ীর উদ্দেশ্যযুক্ত গতি নিয়ন্ত্রণের জন্য একটি সিগন্যাল প্রসেসর সার্কিটকে খাওয়ানো যেতে পারে।
মধ্যে পরের পোস্ট আমরা পিডাব্লুএম কৌশল ব্যবহার করে সিগন্যাল প্রসেসরের স্টেজ শিখব।
মধ্যে উপরের অংশ প্যাডেল অ্যাকশনটিকে আনুপাতিকভাবে পরিবর্তিত বৈদ্যুতিক সংকেতে রূপান্তর করার জন্য আমরা একটি সাধারণ বৈদ্যুতিনজনিত রূপান্তরকারী সমাবেশ সম্পর্কে শিখেছি।
প্যাডেল অ্যাকশনকে পিডব্লিউএম তে রূপান্তর করা
এখন আসুন একটি সার্কিট বাস্তবায়ন অধ্যয়ন করুন যা আমাদের প্যাডেল বৈদ্যুতিক সংকেতটিকে গাড়ির যথাযথ মোটর গতির নিয়ন্ত্রণের জন্য একইভাবে পরিবর্তিত পিডব্লিউএম সংকেতে রূপান্তর করতে সক্ষম করবে will

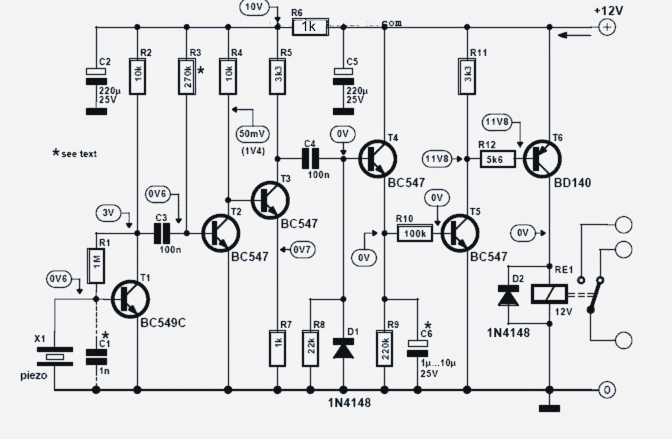
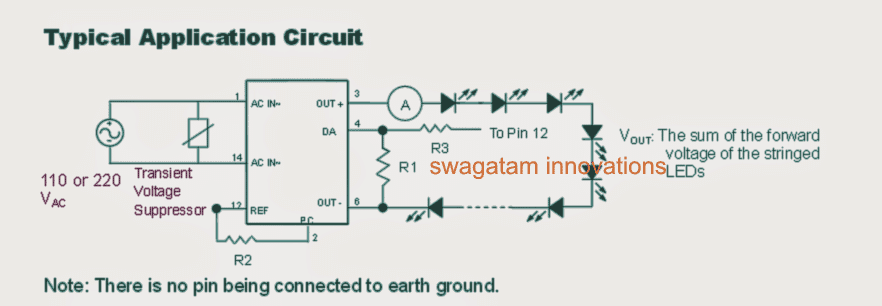
উপরের সার্কিট ডায়াগ্রামের কথা উল্লেখ করে আমরা নিম্নলিখিত পয়েন্টগুলির সাহায্যে সার্কিট অপারেশনটি মূল্যায়ন করতে পারি:
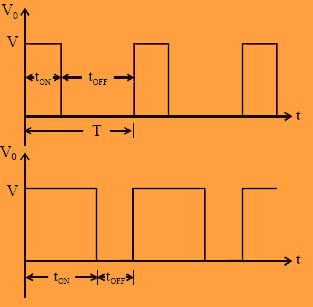
আইসি 1 একটি 80Hz ডাল জেনারেটর হিসাবে কনফিগার করা হয়েছে যার যথাসময়ে সর্বোচ্চ সময় এবং ন্যূনতম বন্ধ সময়কে তার দায়িত্ব চক্র হিসাবে দেওয়া হয়
আইসি 2 একটি তুলনাকারী হিসাবে কঠোর হয় যা প্রথমে উপরের 80Hz ডালটি তার পিন 2 এ প্রয়োগ করা হয় তার পিন 6 এ উত্পন্ন ত্রিভুজ তরঙ্গ দ্বারা এবং তার পিন 5 এ উপলব্ধ মডিউলিং ভোল্টেজের সাথে ত্রিভুজ তরঙ্গগুলির তুলনা করে।
পিন 5 মডিউলিং ভোল্টেজ একটি বিজেটি বিসি 54747 ইমিটার থেকে উদ্ভূত হয়েছে যা পেডাল ক্রিয়াকলাপগুলি থেকে প্রাপ্ত এলডিআর ইনপুটগুলির সাথে যুক্ত তার বেসের সাথে একটি সাধারণ সংগ্রহকারী হিসাবে কনফিগার করা হয়।
প্যাডেল প্রেসিংয়ের প্রতিক্রিয়াতে পরিবর্তিত বিভিন্ন প্রতিরোধগুলি 100 কে প্রিসেট সেটিংয়ের সাথে তুলনা করা হয় এবং ট্রানজিস্টরের গোড়ায় ভোল্টেজের একটি আনুপাতিক মাত্রা বিকশিত হয় যা কম বর্তমান ইনপুটটিকে আইসি 2 এর পিন 5 এর তুলনায় সমমানের উচ্চ বর্তমান সংকেততে রূপান্তর করে।
এই তাত্ক্ষণিক সম্ভাব্য স্তরটি আইসি 2 মোসফেট এবং সংযুক্ত মোটরের জন্য পিডাব্লুএম সংকেতের আনুপাতিক পরিমাণ তৈরি করে গ্রহণ এবং প্রক্রিয়া করে।
মোটর গতি এইভাবে নিয়ন্ত্রণের এবং গাড়ির পেডাল প্রেসের প্রতিক্রিয়া হিসাবে পিলেডব্লিউএম ওঠানামা অনুযায়ী বৈচিত্র্যময় হয়।
উপরের পদ্ধতিগুলি প্যাডাল ক্রিয়াকলাপগুলি কার্যকরভাবে যানবাহন মোটর এবং তার গতির একটি নিয়ন্ত্রিত ক্রিয়ায় রূপান্তর করে।
কীভাবে সার্কিট সেট আপ করবেন।
এটা খুব সহজ.
- প্যাডেলটিকে তার সর্বোচ্চ পয়েন্টে টিপুন যাতে স্ক্রু মাথাটি LED / LDR সমাবেশের সামনে নিকটতম সম্ভাব্য অবস্থানে পৌঁছে যায়।
- এরপরে আইসি 2 এর পিন 3 সর্বাধিক প্রস্থের সাথে পিডব্লিউএম উত্পাদন করা শুরু না হওয়া পর্যন্ত 100k প্রিসেটটি সামঞ্জস্য করুন, এটি পিন 3 এ ভোল্টেজ পরিমাপের মাধ্যমে সার্কিটের সরবরাহের ভোল্টেজের যতটা সম্ভব তার কাছাকাছি হতে পারে তা নিশ্চিত হওয়া যায়, এটি 5 ভি।
- এটি হয়ে গেলে, সেটআপ প্রক্রিয়াটি সম্পূর্ণ বলে ধরে নেওয়া যেতে পারে।
- ফলাফলগুলি এখন বিভিন্ন স্তরে প্যাডেল টিপুন এবং মোটর গতি একটি অভিন্ন পদ্ধতিতে পৃথক করে পরীক্ষা করে যাচাই করা যেতে পারে।
পূর্ববর্তী: সাধারণ ইএসআর মিটার সার্কিট পরবর্তী: গ্রো লাইট সার্কিট কীভাবে তৈরি করবেন