পোস্টটি মাইক্রোকন্ট্রোলার ছাড়াই এবং বিশেষ মোটর ড্রাইভার সার্কিট বা আইসি ব্যবহার না করে রোবট সার্কিট এড়ানো একটি সহজ বাধা ব্যাখ্যা করে। এই ধারণাটি অনুরোধ করেছিলেন মিঃ ফাইয়াজ
নকশা
মূলত এটি একটি আকারে চলন্ত যানবাহন যা তার পথে সম্ভাব্য বাধা সনাক্ত করতে এবং এড়াতে সক্ষম করে এবং এর দিকটি যথাযথভাবে পরিবর্তন করতে পারে যাতে তার গতি নিরবচ্ছিন্ন, সরল থাকে!
অপারেশনটি কোনও ম্যানুয়াল বা মানুষের হস্তক্ষেপ ছাড়াই স্বয়ংক্রিয়।
নাম অনুসারে মাইক্রোকন্ট্রোলার ছাড়াই রোবট এড়ানো বাধা দেওয়ার উপস্থাপিত ধারণাটি কোনও মাইক্রোকন্ট্রোলার নিয়োগ করে না এবং অতএব এটি নির্মাণের পক্ষে অত্যন্ত সহজ এবং কোনও নতুন শখকারীর পক্ষে উপযুক্ত।
সার্কিটটি ডিজাইনের সময় আমি বুঝতে পেরেছিলাম যে নীতিটি বাস্তবায়নের জন্য কমপক্ষে কয়েকটি বাধা সেন্সর মডিউলগুলির প্রয়োজন হবে, কারণ একটি একক মডিউল ব্যবহার করা মোটরটির অনিয়মিত আন্দোলনের কারণ হতে পারে এবং যানটির দিকে কোনও মসৃণ বিবর্তন বা বাঁককে সহায়তা করতে পারে না may একটি মুক্ত পথ
গাড়ির মোটর সেট আপ একইরকম রিমোট কন্ট্রোল খেলনা গাড়ি যা আমি আগের পোস্টগুলির মধ্যে একটিতে আলোচনা করেছি।
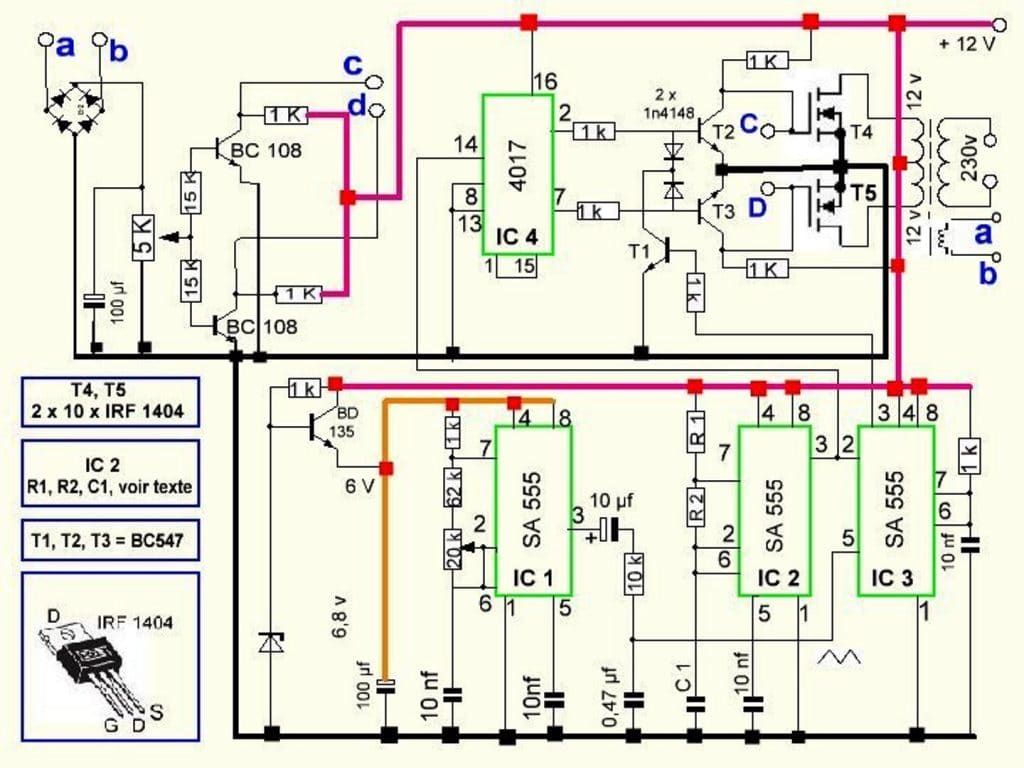
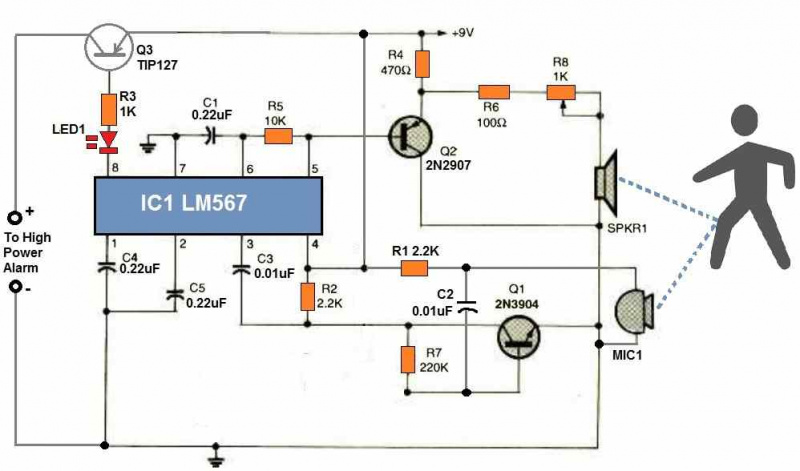
নিম্নলিখিত চিত্রটি সিস্টেমের একটি মডিউলকে উপস্থাপন করে এবং সুতরাং দুটি বা এক জোড়া মডিউলগুলির গাড়ির ডান এবং বাম দিক জুড়ে প্রয়োজন হবে।
ধারণাটি সহজ এবং মাইক্রোকন্ট্রোলার ছাড়াই এবং বিশেষ মোটর ড্রাইভার আইসি ছাড়াই কাজ করে। এর অর্থ আপনি কোনও প্রকারের কোডিং ছাড়াই এবং কোনও ধরণের জটিল মোটর ড্রাইভার আইসি ব্যবহার না করেই এটি তৈরি করতে পারেন ..... এবং সার্কিট আপনাকে যে কোনও ডিসি মোটর এর ক্ষমতা নির্বিশেষে ব্যবহার করতে দেয়, সুতরাং গাড়িগুলি এড়ানো এমনকি উচ্চ শক্তির বাধাও হতে পারে এই সার্কিটটি ব্যবহার করে তৈরি করা হয় যা সাধারণত মল এবং অনুরূপ খুচরা বিক্রয় কেন্দ্রগুলিতে ব্যবহৃত হয়।
বর্তনী চিত্র

এখন আসুন নীচের ব্যাখ্যার সাহায্যে উপরের সার্কিটটি বোঝার চেষ্টা করুন:
কিভাবে এটা কাজ করে
আইসি 555 আইআর ট্রান্সমিটার হিসাবে কনফিগার করা হয়েছে এবং ধ্রুবক 38kHz ফ্রিকোয়েন্সি উত্পন্ন করতে সেট করা হয়, যখন সংলগ্ন ট্রানজিস্টরাইজড সার্কিটটি রিসিভার স্টেজ বা আইআর সেন্সর পর্যায়ে কনফিগার করা হয়।
আসুন ধরে নেওয়া যাক এটি ডান পাশের মডিউল, এবং ধরুন এই মডিউলটি পথের মধ্যে কোনও বাধা সনাক্ত করার জন্য প্রথমটি ঘটেছে।
অতএব কোনও বাধা সনাক্ত হওয়ার সাথে সাথে, 555 আইসি দ্বারা উত্পন্ন 38kHz ফ্রিকোয়েন্সি সংলগ্ন রিসিভার সার্কিটের সেন্সরের দিকে প্রতিফলিত হয়।
রিসিভার তাত্ক্ষণিকভাবে সম্পর্কিত ট্রানজিস্টরগুলিকে সক্রিয় করে তোলে যাতে চূড়ান্ত ড্রাইভার ট্রানজিস্টর পরিচালনা করতে বাধা দেয়।
এখন এই ট্রানজিস্টর দ্বারা নিয়ন্ত্রিত মোটরটি এই গাড়ির মডিউলটির বিপরীত দিকে, গাড়ির বাম দিকে অবস্থিত বলে মনে করা হচ্ছে ... একইভাবে ডানদিকে অবস্থিত মোটরটি বাম পাশের মডিউল দ্বারা আসলে নিয়ন্ত্রিত হয় ।
ফলস্বরূপ, যখন উপরের ধরে নেওয়া ডান হাতের বাধা সনাক্তকারী মডিউলটি সক্রিয় হয়, তখন এটি বাম পাশের মোটরটি থামায়, যখন ডান পাশের মোটরটি স্বাভাবিকভাবে চলার অনুমতি দেয়।
এই পরিস্থিতির ফলে যানবাহনটি বাম দিকের মোড় নিতে বাধ্য হয় ... যার অর্থ এখন ধরে নেওয়া বাম মডিউল আরও শক্তিশালী বাধা সংকেত পেতে শুরু করে এবং গাড়িটি পুরোপুরি বাধা এড়ানোর আগ পর্যন্ত চলমান বিবর্তনে আরও শক্তভাবে এগিয়ে যেতে বাধ্য করে চলেছে । মডিউলটি এখন বাধা সংকেত গ্রহণ বন্ধ করে এবং গাড়িটি তার নতুন পথে স্বাভাবিকভাবে এগিয়ে যেতে শুরু করে।
উপরের দিকটি ঘুরিয়ে দেওয়ার সময় বাম দিকের মডিউলটি আরও বেশি বেশি বিচ্ছিন্ন হয়ে বাধা থেকে দূরে থাকতে বাধ্য হয় যাতে এটি পদ্ধতিতে হস্তক্ষেপ করার সুযোগ না পায় এবং যানবাহনের একটি পরিষ্কার এবং মসৃণ পরিবর্তন করতে দেয়।
বাম পাশের মডিউলটি ডান পাশের মডিউলটির সামনে বাধা বুঝতে পেরে ঠিক একই পদ্ধতিগুলি প্রয়োগ করা হয়, যেখানে গাড়িটি ডান পাশের দিকে আরও শক্ত এবং শক্তভাবে এগিয়ে যেতে বাধ্য হয়।
আমরা মডিউলটিতে একটি 'অক্ষম' সার্কিট স্টেজও দেখতে পারি যা বাম এবং ডান পাশের মডিউলগুলি জুড়ে একে অপরের সাথে সংযুক্ত। উভয় মডিউল কখনই এক সাথে সক্রিয় হয় না তা নিশ্চিত করার জন্য এই পর্যায়টি উদ্দেশ্যমূলকভাবে চালু করা হয়েছে।
সুতরাং উদাহরণস্বরূপ, যদি বাম দিকের মডিউলটি কোনও প্রতিবন্ধকতা সনাক্ত করতে প্রথম হয়ে যায়, এটি অবিলম্বে ডান পাশের মডিউলটি অক্ষম করে এবং ডানদিকে এবং তার বিপরীতে গাড়ির বিবর্তন শুরু করে।
সেন্সর আইসি একটি হতে পারে স্ট্যান্ডার্ড TSOP17XX সিরিজ
উপরের সেন্সর আইসি সম্পর্কিত আরও তথ্যের জন্য আপনি শিখতে পারেন কিভাবে TSOP1738 আইসি সংযোগ করবেন
এবং মোটরটি গিয়ার বাক্সগুলিতে সজ্জিত করা উচিত যাতে আন্দোলনটি মূলত একটি নিয়ন্ত্রিত স্তরে বজায় থাকে।
চাকা সেট আপ
বাম এবং ডান মডিউলটির সম্পূর্ণ সেট আপ এবং সম্পর্কিত বৈদ্যুতিক সংযোগগুলি নীচের চিত্রটিতে প্রত্যক্ষ করা যেতে পারে:

হালনাগাদ
সামান্য চিন্তাভাবনা আমাদের জানায় যে রোবট সার্কিট এড়ানো উপরের সাধারণ বাধাটি দুটিয়ের পরিবর্তে একটি একক মডিউল ব্যবহার করে প্রয়োগ করা যেতে পারে।
তবে কোনও একক মডিউল যখনই প্রতিবন্ধকতা সনাক্ত করে তখনই গাড়িটিকে একতরফা পার্সোনেশন চালানোর অনুমতি দেয়, সুতরাং ক্রিয়াকলাপের জন্য কোন মোটরটি সার্কিটের সাথে সংযুক্ত রয়েছে তার উপর ভিত্তি করে সিস্টেমটি একটি ক্লকওয়াইজ ডাইভার্শন বা অ্যান্টলিকওয়াইজ ডাইভারশন গ্রহণের জন্য কনফিগার করা যেতে পারে।
উদাহরণস্বরূপ স্থাপনটি নিম্নলিখিত চিত্রটিতে দৃশ্যমান হতে পারে:

তবে, মনে হয় উপরের সিঙ্গল মোটর সেট আপ করার ক্ষেত্রে একটি সমস্যা আছে problem ধরুন যদি গাড়ীটি বাম পাশের একটি ডান কোণযুক্ত কোণের মুখোমুখি হয়। এটি কোনও ইউ-টার্ন না নেওয়ার আগে থেকে গাড়িটি অ্যান্টলিক দিকের দিকে চালিত রাখতে বাধ্য করে এবং যেখানে শুরু হয়েছিল সেদিকেই ফিরে যেতে শুরু করে। এটি এমন কোনও বিষয় নয় যা ব্যবহারকারীরা প্রশংসা করবে।
পূর্ববর্তী: এসএমডি প্রতিরোধক - ভূমিকা এবং কাজ পরবর্তী: অ্যাকসিলোমিটার কীভাবে কাজ করে