
কম্পিউটিংয়ে, ক্যান ইন্টারফেসটি সিস্টেম কথোপকথনের তথ্যের দুটি পৃথক অংশ জুড়ে একটি ভাগ করা সীমানা হতে পারে। কম্পিউটার হার্ডওয়্যার, সফ্টওয়্যার, মানুষ, পেরিফেরিয়াল ডিভাইস এবং এগুলির সংমিশ্রণের মধ্যে কথোপকথনটি করা যেতে পারে। টাচস্ক্রিনের মতো কম্পিউটারের কয়েকটি হার্ডওয়্যার ডিভাইস কারণ একটি টাচ স্ক্রিন তথ্য ভাগ করে নিতে এবং গ্রহণ করতে পারে ইন্টারফেসের মাধ্যমে, অন্য মাইক্রোফোনের মতো ডিভাইসগুলি, মাউস কেবল একটি উপায়। ইন্টারফেস মূলত দুটি ধরণের হয় যেমন হার্ডওয়্যার ইন্টারফেসিং এবং সফ্টওয়্যার ইন্টারফেসিং। হার্ডওয়্যার ইন্টারফেসগুলি ইনপুট, আউটপুট ডিভাইস, বাস এবং স্টোরেজ ডিভাইসের মতো অনেক ডিভাইসে ব্যবহৃত হয়। এই ক্যান ইন্টারফেসটি লজিক সংকেত দ্বারা সংজ্ঞায়িত করা যেতে পারে। একটি সফ্টওয়্যার ইন্টারফেস বিভিন্ন স্তরে বিস্তৃত আকারে উপলব্ধ। একটি ওএস হার্ডওয়্যারের বিভিন্ন অংশের সাথে ইন্টারফেস করতে পারে। প্রোগ্রাম বা অ্যাপ্লিকেশন ওএসের যোগাযোগের প্রয়োজন হতে পারে স্ট্রিমগুলির মাধ্যমে এবং অবজেক্ট ওরিয়েন্টেড প্রোগ্রামিংয়ে, কোনও অ্যাপ্লিকেশনের অবজেক্টগুলিকে পদ্ধতির মাধ্যমে যোগাযোগ করা দরকার।

বাস করতে
ক্যান বাসটি ১৯৮৩ সালে রবার্ট বোশ জিএমবিএইচ-তে বিকশিত হয়েছিল। এই প্রোটোকলটি মিশিগানের ডেট্রয়েটের SAE কংগ্রেসে (সোসাইটি অফ অটোমোবাইল ইঞ্জিনিয়ার্স) 1986 সালে প্রকাশিত হয়েছিল। প্রথম প্রোটোকল ক্যান ফিলিপস এবং ইন্টেল প্রযোজনা করেছিল এবং ১৯৮7 সালে বাজারে প্রকাশিত হয়েছিল। কিন্তু বিএমডাব্লু সিরিজ -৮ হ'ল প্রথম বাহন যা একটি ক্যান প্রোটোকল ভিত্তিক মাল্টিপ্লেক্স ওয়্যারিং সিস্টেম বৈশিষ্ট্যযুক্ত।

বাস করতে
এর সম্পূর্ণ ফর্ম ক্যান একটি নিয়ামক অঞ্চল নেটওয়ার্ক । এটি এক ধরণের যানবাহন বাস যা মূলত বিভিন্নকে অনুমতি দেওয়ার জন্য ডিজাইন করা হয়েছে ডিভাইস এবং মাইক্রোকন্ট্রোলার একটি হোস্ট কম্পিউটার ছাড়া একে অপরের সাথে যোগাযোগ করার জন্য। এই প্রোটোকল একটি বার্তার উপর ভিত্তি করে এবং মূলত অটোমোবাইলগুলিতে বৈদ্যুতিক তারের জন্য ডিজাইন করা হয়েছে। বোশ সিএএন-র বিভিন্ন সংস্করণ প্রকাশ করেছিল এবং ১৯৯১ সালে সর্বশেষ সর্বশেষ CAN 2.0 প্রকাশিত হয়েছিল।
ক্যান দুটি অংশ নিয়ে গঠিত যেমন প্রধানত অংশ এ এবং পার্ট বি যেখানে পার্ট এ 11-বিট সনাক্তকারী এবং এটি স্ট্যান্ডার্ড ফর্ম্যাটে রয়েছে। পার্ট বি একটি 29 বিট শনাক্তকারী এবং এটি বর্ধিত বিন্যাসে রয়েছে। যে ক্যান 11-বিট আইডেন্টিফায়ার ব্যবহার করে তাকে এএন 2.0 এ বলা হয় এবং একটি ক্যান যা 29-বিট আইডেন্টিফায়ার ব্যবহার করে এটিকে CAN 2.0B বলা যেতে পারে
ইউএসবিতে সিএএন ইন্টারফেসিং ing
ইউএসবিতে সিএএন-তে ইন্টারফেস করা একটি সাধারণ ডিভাইস, যা সিএন বাস পর্যবেক্ষণ করতে ব্যবহৃত হয়। এই ডিভাইসটি NUC140LC1CN 32 K Cortexes-M0 মাইক্রোপ্রসেসর ব্যবহার করে। এটিতে ক্যান এবং ইউএসবি উভয় পেরিফেরিয়াল রয়েছে।
ইন্টারফেসিং সিএনএস থেকে মূল বৈশিষ্ট্যগুলি হ'ল
- এটি ডিজাইন করা খুব সহজ
- সঙ্গে ভাল মেলে প্রোটোকল আইনজীবি কানাসব
- এফটিডিডিআই ইউএসবি এর মতো একটি ডিভাইস হিসাবে নিজেকে প্রকাশ করছে
- এটি ক্যান 2.0 বি 29-বিট এবং ক্যান 2.0 এ 11-বিট ফ্রেম সমর্থন করে
- এটিতে একটি অভ্যন্তরীণ বার্তা বাফার রয়েছে (ফিফো ক্যান)
- এটি ইউএসবি পোর্ট থেকে পাওয়ার করে
- ফার্মওয়্যার আপডেটের জন্য একটি ভর স্টোরেজ ডিভাইস (ফ্ল্যাশ-বাসিন্দা ইউএসবি) ব্যবহৃত হয়
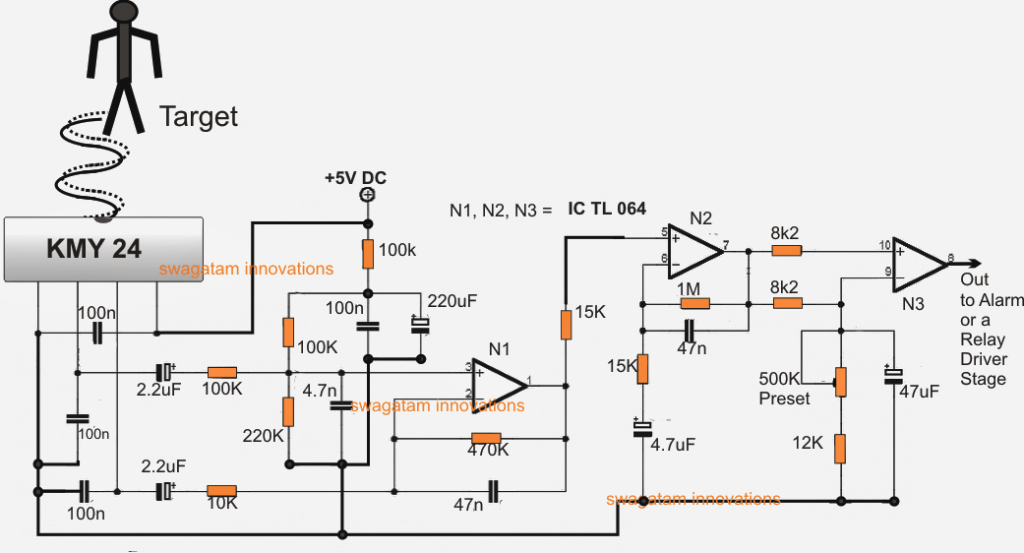
পরিকল্পিত ডায়াগ্রাম
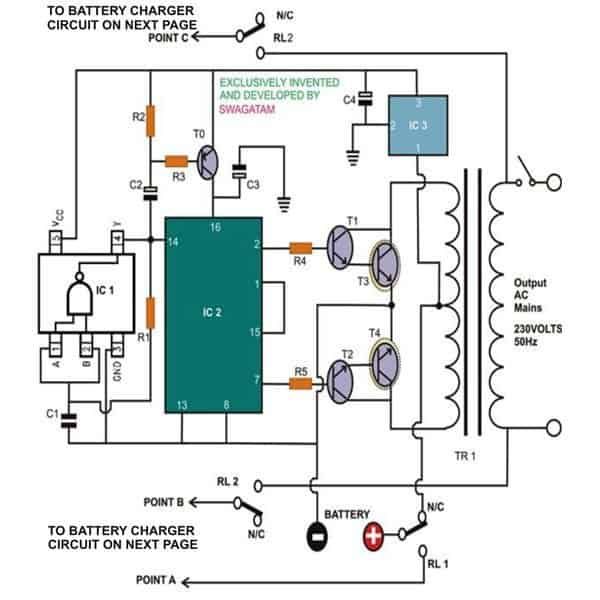
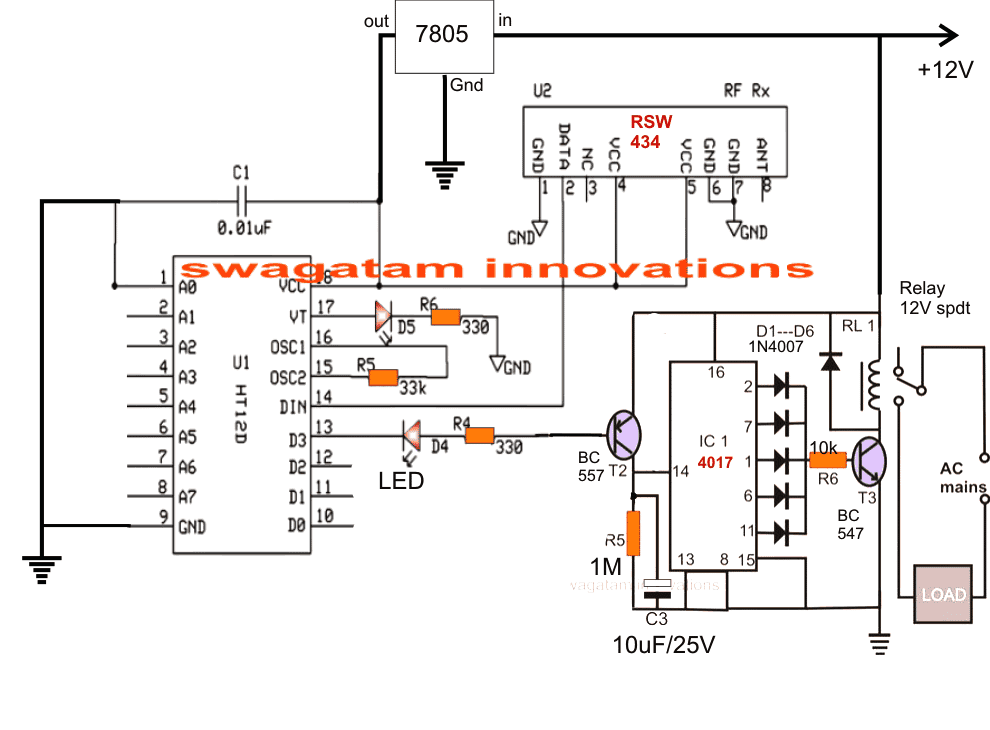
CAN থেকে USB এ ইন্টারফেসিংয়ের সার্কিট কনফিগারেশনটি নীচে দেখানো হয়েছে। ক্যান ট্রান্সফর্মারটি NUC140 CAN ডিভাইসটি CAN বাসের সাথে যোগাযোগের জন্য সক্ষম করতে ব্যবহৃত হয়। চিপ টিজেএ 1051 টি এনএক্সপি থেকে উদ্দেশ্যটি সমাধান করে। মাইক্রোপ্রসেসর NUC140 একটি 5V বিদ্যুৎ সরবরাহের সাথে কাজ করতে সক্ষম যেখানে অতিরিক্ত 3.3V ভোল্টেজ নিয়ামকের কোনও প্রয়োজন নেই। এই সুবিধাজনক ব্যবস্থা CAN থেকে USB ইন্টারফেস প্রয়োগ করতে একটি সহজ কাজ করে।

পরিকল্পিত ডায়াগ্রাম
সার্কিটটি D1, D2 এবং D3 নামক তিনটি স্থিতির এলইডি দিয়ে তৈরি।
- এখানে ডি 1 ডায়োডের স্থিতিটি বলে যে ইউএসবি হোস্টের সাথে সংযুক্ত
- এখানে ডি 2 ডায়োডের স্থিতি বলছে যে সিএন বাসের ক্রিয়াকলাপ
- সিএন বাসের ত্রুটিগুলি ডি 3 ডায়োড দ্বারা চিহ্নিত করা যেতে পারে
NUC140 মাইক্রোপ্রসেসরের একটি ইন্টিগ্রেটেড বুট লোডার নেই এবং প্রোগ্রামের সর্বোত্তম উপায়টি কেবল নব্যটন আইসিপি প্রোগ্রামার এবং আর্ম এসডাব্লুডি (সিরিয়াল ওয়্যার ডিবাগ) ইন্টারফেস। বুট লোডারটি যদি কোনও প্রোগ্রামের সাথে আগে ফেলে দেওয়া হয় তবে এটি ট্রিগার হতে পারে। ইন্টারফেসটি পাওয়ার আগে JP1 কে সংযুক্ত করা বুট লোডারটিকে ট্রিগার করবে।
বুট লোডার
NUC140LC1 মাইক্রোপ্রসেসরের ফ্ল্যাশ মেমরি দুটি বিভাগে বিভক্ত। তারা ব্যবহারকারীর প্রোগ্রাম কোড এবং বুট লোডার চালাচ্ছে। বুট লোডার এবং এক্সিকিউটিং ইউজার প্রোগ্রামের আকার 4K এবং 32K is এখানে নুভাটন থেকে ভর স্টোরেজ ডিভাইস (এমএসডি) বুট লোডার একটি সম্পূর্ণ কার্যকরী ইউএসবি বুট লোডার তৈরি করতে ব্যবহৃত হয়। বুট লোডার একটি জেপ 1 জম্পার সংযুক্ত করে সক্রিয় করবে। সুতরাং পরিশেষে, একটি অপসারণযোগ্য ড্রাইভ 32KB আকারের হোস্ট ফাইল সিস্টেমে দৃশ্যমান হতে হবে। বুট লোডার ড্রাইভটিতে কেবল ইউএসবি ফার্মওয়্যারের কাছে ক্যানের আপডেটটি অনুলিপি করুন এবং আটকান। ইউএসবি কেবলটি সংযোগ বিচ্ছিন্ন করুন, জাম্পারটি সংযোগ বিচ্ছিন্ন করুন এবং এটিকে আবার প্লাগ ইন করুন। নতুন ফার্মওয়্যারের আপডেট এখন চলছে।

বুট লোডার
ইউএসবি ইন্টারফেস প্রোগ্রামিং এবং নুটাইনি-এসডিকে-140 এ করতে পারেন
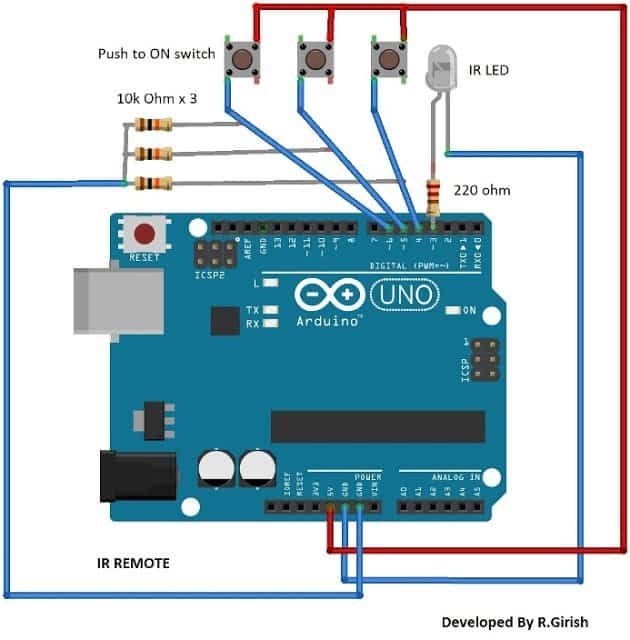
মাইক্রোপ্রসেসর প্রোগ্রামিং NUC140 এর জন্য Nuvoton ICP প্রোগ্রামিং অ্যাপ্লিকেশন এবং Novoton এর অনু-লিংক প্রোগ্রামার প্রয়োজন। তবে এখানে ডিজি-কী থেকে নিউটিনি-এসডিকে-140 (এনইউসি 140 ডেমো বোর্ড) উপলব্ধ। এটিতে দুটি অংশ যেমন নু-লিংক প্রোগ্রামারস এবং NUC140 চিপযুক্ত অংশ রয়েছে। এই বোর্ডটি অনু-লিঙ্কের অংশটি আলাদা করতে এমনকি ছিদ্রযুক্ত। প্রকৃতপক্ষে, আপনি NUC140 ডেমো বোর্ডের চারপাশে এই ডিভাইসটি একচেটিয়াভাবে ডিজাইন করতে পারেন, কেবলমাত্র একটি অতিরিক্ত CAN ট্রান্সসিভার চিপটি প্রয়োজনীয় হবে।

NUC140 বোর্ড
সুতরাং, এটি ইউএসবি সহ সিএন ইন্টারফেসের মধ্যে রয়েছে, ক্যান বাস, ইউএসবিতে সিএন ইন্টারফেসিং, স্কিম্যাটিক ডায়াগ্রাম, বুট লোডার এবং NUC140 মাইক্রোপ্রসেসর। আমরা আশা করি আপনি এই ধারণাটির আরও ভাল ধারণা পেয়েছেন। তদ্ব্যতীত, এই নিবন্ধ সম্পর্কিত যে কোনও প্রশ্ন নীচে মন্তব্য বিভাগে মন্তব্য করে আপনার মূল্যবান পরামর্শ দিন। আপনার জন্য এখানে একটি প্রশ্ন, সিএএন ইন্টারফেসের প্রয়োগগুলি কী কী?
ছবির ক্রেডিট:
- ইউএসবি ইন্টারফেস থেকে ক্যান সেলিগ
- বাস করতে ক্যানবাসকিট
- NUC140 প্রশিক্ষণযোগ্য




{kind=link}
{kind=link}
{kind=link}