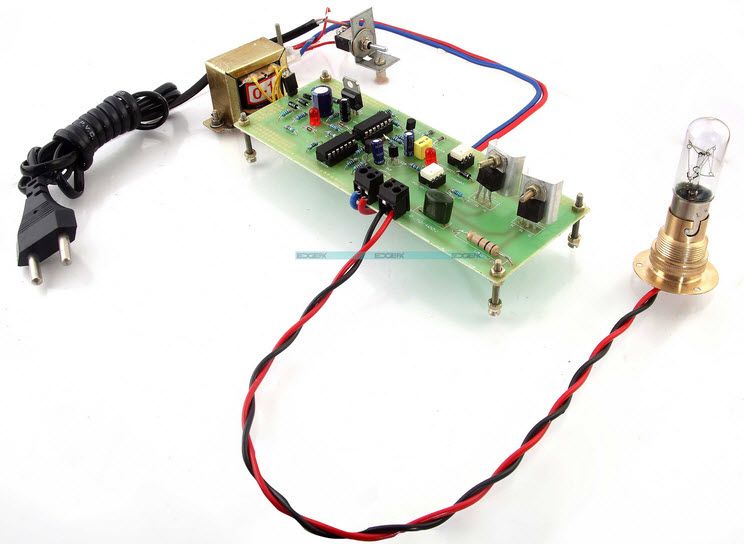
নিবন্ধটি একটি সাধারণ ইনফ্রারেড (আইআর) রিমোট কন্ট্রোল সার্কিট নিয়ে আলোচনা করেছে যা একটি স্ট্যান্ডার্ড আইআর রিমোট হ্যান্ডসেট যেমন টিভি রিমোট বা ডিভিডি রিমোট থেকে তৈরি স্যুইচিংয়ের প্রতিক্রিয়ায় ডিসি মোটর পরিচালনার জন্য কনফিগার করা হয়েছে।
সংযুক্ত মোটরটি যে কোনও উপায়ে সরানো যায় এবং থামাতেও তৈরি করা যায়।
সার্কিটটি নিম্নলিখিত ব্যাখ্যাগুলির সাথে বোঝা যেতে পারে:
কিভাবে এটা কাজ করে
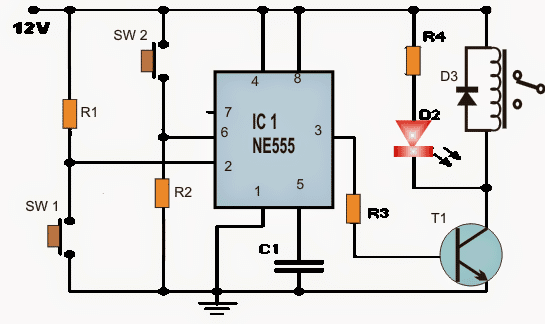
প্রদত্ত সার্কিট ডায়াগ্রামে দেখা যায়, সেন্সরটি কোনও স্ট্যান্ডার্ড থ্রি পিন আইআর সেন্সর মডিউল যা সাধারণত কোনও টিভি আইআর রিমোট হ্যান্ডসেটটিতে সাড়া দেয়।
যখন একটি আইআর (ইনফ্রারেড) মরীচি সেন্সরে ফোকাস করা হয়, তখন আউটপুট হিসাবে পিন হিসাবে চিহ্নিত করা হয় কারণ যুক্তি কম হয়। এই পরিস্থিতি যতক্ষণ না রশ্মি এতে কেন্দ্রীভূত থাকে ততক্ষণ টিকে থাকে।
ট্রানজিস্টার টি 1 যা একটি পিএনপি এই যুক্তিটি কম সংকেতকে সাড়া দেয় এবং সংযুক্ত রিলে আরএল 1 স্যুইচিং পরিচালনা করে।
যোগাযোগগুলি তাত্ক্ষণিকভাবে ট্রান্সজিস্টরের সংগ্রাহকের তাত্ক্ষণিক ধনাত্মক সম্ভাবনাকে আইসি 1 এর # 14 পিনে সংযুক্ত করে যা ফ্লিপ ফ্লপ সার্কিট হিসাবে তারযুক্ত হয়।
প্রাথমিক লজিক সিকোয়েন্সটি আইসির পিন # 3 এ হবে বলে ধরে নিয়ে, উপরোক্ত ট্রিগারটি ক্রমটিকে আইসির # 2 পিনে স্থানান্তরিত করে এটি উচ্চ করে তুলেছে।
এটি টি 2 এবং এটি সম্পর্কিত রিলে আরএল 2 চালু করে।
আরএল 2 মোটরটির নির্দিষ্ট তারটিকে নেতিবাচক সরবরাহের সাথে পরিচালনা করে এবং সংযুক্ত করে। যেহেতু মোটরটির অন্য টার্মিনালটি আরএল 3 থেকে ইতিবাচক হয়, তাই এটি সেটের দিকে এগিয়ে যেতে শুরু করে।
এখন ধরা যাক, সেন্সরটিকে আইআর রিমোট হ্যান্ডসেটের মাধ্যমে একটি পরবর্তী ট্রিগার দেওয়া হবে, উপরের প্রক্রিয়াটি পুনরাবৃত্তি হবে এবং আউটপুট সিকোয়েন্সটি পিন # 2 থেকে আইসি 1 এর পিন # 4 এ স্থানান্তরিত হবে, যা টিএফ অফ টি 2 স্যুইচ করার সাথে সাথে তত্ক্ষণাত্ টি 3 চালু করে।
উপরের ক্রিয়াটি মোটরটিকে তত্ক্ষণাত তার ঘূর্ণন দিকটি ফ্লিপ করতে বাধ্য করে রিলে সংযোগগুলি ফিরিয়ে দেয়।
রিমোট হ্যান্ডসেট থেকে পরবর্তী একটি ট্রিগার দিয়ে, সিকোয়েন্সটি ফিরে পিন # 3 এ ফিরে আসে, যা কোনও কিছুর সাথে সংযুক্ত নয় এবং মোটরটিকে সম্পূর্ণরূপে স্যুইচ অফ করে দেয়।
এল 1, সি 1 এর অন্তর্ভুক্তি নিশ্চিত করে যে সেন্সরকে উদ্দীপিত ট্রিগার দিয়ে সার্কিটগুলি প্রভাবিত হবে না।
অনুকূল মানটি পাওয়ার জন্য এল 1 পরীক্ষা করা যেতে পারে যাতে এটি কেবল দুর্ঘটনাক্রমে বিপথগামী বাহ্যিক সংকেতগুলিকে 'ভিত্তি করে' এবং রিমোট কন্ট্রোল হ্যান্ডসেট থেকে আসল আইআর সিগন্যালগুলিকে নয়।


উপরের আইআর (ইনফ্রা লাল) রিমোট কন্ট্রোল মোটর সার্কিটের অংশগুলির তালিকা List
আর 1 = 100 ওহমস,
আর 2 = 1 কে
আর 3, আর 4, আর 5, আর 6, আর 7 = 10 কে
সি 1, সি 4, সি 6 = 100 ইউ এফ / 25 ভি
সি 2, সি 3, সি 7 = 0.22uF
C5 = 1000uF / 25V
সি 6 = 0.22uF
L1 = 100mH দমবন্ধ
টি 1 = বিসি 557
টি 2, টি 3 = বিসি 577
ডি 1 --- ডি 7 = 1 এন 40000
আইসি 1 = আইসি 4017
আইসি 2 = 7812
সমস্ত রিলে = 12 ভি / 400 ওহমস / এসপিডিটি
সেন্সর = TSOP1738
মোটর = 12 ভি ডিসি মোটর
পূর্ববর্তী: একটি সার্জারি দমনকারী হিসাবে একটি এনটিসি থার্মিস্টর ব্যবহার করা পরবর্তী: এমজেই 13005 কমপ্যাক্ট 220 ভি পাওয়ার সাপ্লাই সার্কিট