বর্তমানে ইন শিল্প স্বয়ংক্রিয়তা , বিভিন্ন ধরণের স্মার্ট ফিল্ড ডিভাইস ব্যবহার করা হয় তবে কর্তৃপক্ষ বা ফিল্ড ইঞ্জিনিয়ারদের দ্বারা শিল্পের মধ্যে প্রতিটি ডিভাইস পর্যবেক্ষণ করা খুব কঠিন। তাই সাধারণত, এই ধরনের মনিটরিং স্মার্ট ডিভাইসগুলির সাথে অর্জন করা হয়, যা শিল্পের ভিতরে এবং বাইরের বিভিন্ন সংযুক্ত ডিভাইসের মধ্যে প্রধান পর্যবেক্ষণ সিস্টেমে ডেটা স্থানান্তর করার অনুমতি দেয়। সুতরাং, HART প্রোটোকলটি 1980 সালে চালু করা হয়েছিল এবং বেল 202 স্ট্যান্ডার্ডে তৈরি করা হয়েছিল। এই প্রোটোকলটি একটি শিল্প মান হয়ে উঠেছে, তাই শিল্প অটোমেশনে ব্যবহৃত হয়। সুতরাং, এই নিবন্ধটি একটি ওভারভিউ আলোচনা HART প্রোটোকল - অ্যাপ্লিকেশনগুলির সাথে কাজ করা।
HART প্রোটোকল কি?
HART প্রোটোকলে HART শব্দটি 'হাইওয়ে অ্যাড্রেসেবল রিমোট ট্রান্সডুসার' এর জন্য দাঁড়ায় যা একটি উন্মুক্ত মানক প্রোটোকল যা বিশ্বব্যাপী স্মার্ট ডিভাইসের মধ্যে অ্যানালগ ওয়্যারিং সহ ডিজিটাল ডেটা প্রেরণ ও গ্রহণ করতে ব্যবহৃত হয়। নিয়ন্ত্রণ ব্যবস্থা . এই প্রোটোকলটি খুবই জনপ্রিয়, তাই সারা বিশ্বে 30 মিলিয়নেরও বেশি ডিভাইসগুলি HART প্রোটোকল দ্বারা চালিত। এই প্রোটোকলটি হোস্ট সিস্টেমের পাশাপাশি শিল্পগুলিতে স্মার্ট ফিল্ড ডিভাইসগুলির মধ্যে যোগাযোগ স্থাপন করতে ব্যবহৃত হয়।
ডিজিটাল স্মার্ট ইন্সট্রুমেন্টেশনের প্রধান সুবিধা সহ পুরানো 4-20 mA ভিত্তিক অ্যানালগ প্রোটোকল সমর্থন করার ক্ষমতার কারণে HART প্রোটোকল আরও জনপ্রিয়তা অর্জন করেছে।
এই প্রোটোকল শারীরিক সংযোগ প্রযুক্তি বর্ণনা করে এবং বিভিন্ন অ্যাপ্লিকেশন দ্বারা ব্যবহৃত কমান্ডগুলিও বর্ণনা করে। হার্ট কমান্ড তিন ধরনের ইউনিভার্সাল, কমন প্র্যাকটিস এবং ডিভাইস স্পেসিফিক।
ইউনিভার্সাল-টাইপ কমান্ড সমস্ত HART ডিভাইসের মাধ্যমে প্রয়োগ করা হয়। এই কমান্ডগুলি প্রধানত একটি কন্ট্রোলার দ্বারা একটি ফিল্ড ডিভাইস সনাক্ত করার পাশাপাশি প্রক্রিয়া ডেটা পড়ার জন্য ব্যবহৃত হয়।
সাধারণ অনুশীলন টাইপ কমান্ডগুলি বিভিন্ন ফাংশন বর্ণনা করতে ব্যবহৃত হয় যা সাধারণত শুধুমাত্র ফিল্ড ডিভাইসের জন্য প্রযোজ্য। এই ডিভাইসগুলিতে পরিসীমা পরিবর্তন, প্রকৌশল ইউনিট নির্বাচন এবং স্ব-পরীক্ষা চালানোর জন্য কমান্ড অন্তর্ভুক্ত রয়েছে।
ডিভাইস-নির্দিষ্ট ধরনের কমান্ড প্রতিটি ডিভাইসের জন্য একই নয়। এই কমান্ডগুলি অনন্য কনফিগারেশন এবং পরিবর্তন ফাংশন চালায়। সুতরাং, এটি লক্ষ্য করা খুবই তাৎপর্যপূর্ণ যে যখন বিভিন্ন নির্মাতার ডিভাইসগুলি বাহ্যিকভাবে অনুরূপ কার্যকারিতা প্রয়োগ করে। উদাহরণস্বরূপ, ডিফারেনশিয়াল প্রেসার পরিমাপ সম্পূর্ণরূপে বিভিন্ন হার্ডওয়্যার এবং বিভিন্ন ডিভাইস-নির্দিষ্ট কমান্ড সেট অন্তর্ভুক্ত করতে পারে।
হার্ট প্রোটোকল আর্কিটেকচার
HART প্রোটোকল দুটি নেটওয়ার্ক কনফিগারেশনে কাজ করে যেমন পয়েন্ট টু পয়েন্ট এবং মাল্টি-পয়েন্ট যা নীচে আলোচনা করা হয়েছে।
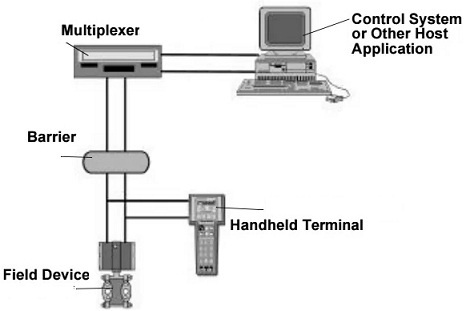
পয়েন্ট টু পয়েন্ট নেটওয়ার্ক কনফিগারেশন
পয়েন্ট-টু-পয়েন্ট নেটওয়ার্ক কনফিগারেশনে, একটি একক প্রক্রিয়া ভেরিয়েবলের সাথে যোগাযোগের জন্য, স্থির 4-20 mA সংকেত ব্যবহার করা হয় যেখানে অতিরিক্ত প্রক্রিয়া ভেরিয়েবল, এবং ডিজাইন প্যারামিটারগুলি HART প্রোটোকলের সাথে ডিজিটালভাবে প্রেরণ করা হয়। সুতরাং, 4-20 mA এনালগ সংকেত HART সংকেত দ্বারা পরিবর্তিত হয় না এবং একটি স্বাভাবিক উপায়ে ব্যবহার করা যেতে পারে। HART কমিউনিকেশন ডিজিটাল সিগন্যাল সেকেন্ডারি ভেরিয়েবলে প্রবেশের অধিকার প্রদান করে এবং অন্যান্য ডেটা রক্ষণাবেক্ষণ, কমিশনিং, অপারেশন এবং ডায়াগনস্টিক উদ্দেশ্যে ব্যবহার করা যেতে পারে।
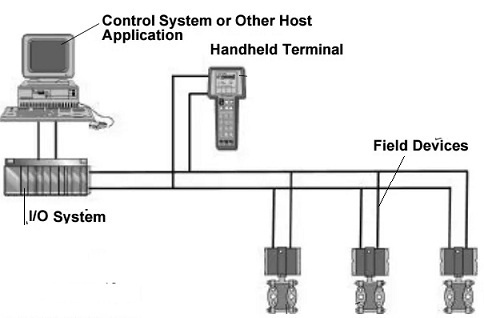
মাল্টি ড্রপ নেটওয়ার্ক কনফিগারেশন
এই নেটওয়ার্ক কনফিগারেশন বিভিন্ন ডিভাইসকে এক জোড়া তারের সাথে সংযুক্ত করার অনুমতি দেয়। এই কনফিগারেশনের মধ্যে যোগাযোগ সম্পূর্ণরূপে ডিজিটাল যেহেতু অ্যানালগ লুপ কারেন্ট জুড়ে যোগাযোগ নিষ্ক্রিয় করা হয়েছে কারণ প্রতিটি ডিভাইস জুড়ে কারেন্ট সাধারণত 4mA ডিভাইসের অপারেশনের জন্য ন্যূনতম পর্যাপ্ত মান নির্ধারণ করা হয়।
HART কমিউনিকেশন কিভাবে কাজ করে?
HART কমিউনিকেশন প্রোটোকল বেল 202 FSK (ফ্রিকোয়েন্সি শিফ্ট কীিং) স্ট্যান্ডার্ড ব্যবহার করে ডিজিটাল সিগন্যালকে সুপার ইমপোজ করতে যা 1,200 Hz এবং 2,200 Hz এর মতো দুটি ভিন্ন ফ্রিকোয়েন্সি দিয়ে উপস্থাপন করা হয়। এখানে, 1,200 Hz ফ্রিকোয়েন্সি বিট 1 প্রতিনিধিত্ব করে যেখানে 2,200 Hz ফ্রিকোয়েন্সি অনুরূপভাবে বিট 0 প্রতিনিধিত্ব করে।
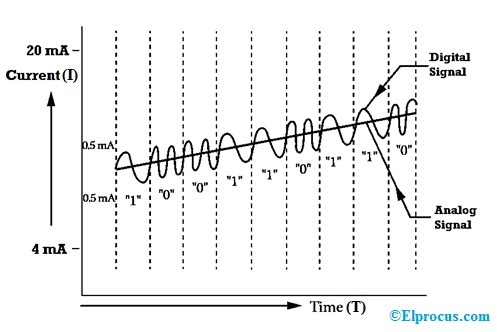
যখন এই ফ্রিকোয়েন্সিগুলির সাথে সাইন তরঙ্গগুলি ডিসি অ্যানালগ সংকেত তারের উপর থাকে তখন ডেটা স্থানান্তর ঘটে। সুতরাং, এই ডেটা স্থানান্তরের সময়, শূন্যের সমতুল্য ফ্রিকোয়েন্সি শিফট কীিং সিগন্যালের স্ট্যান্ডার্ড মানের কারণে 4-20 mA সংকেত প্রভাবিত হয় না। এই প্রোটোকলটি একটি সময়ে 4-20 mA এনালগ সংকেত এবং ডিজিটাল সংকেতের মতো দুটি যোগাযোগ চ্যানেল সমর্থন করে।
এনালগ সিগন্যাল প্রাথমিক পরিমাপিত মানকে 4-20mA বর্তমান লুপের সাথে যোগাযোগ করে যেখানে অতিরিক্ত ডিভাইস ডেটা একটি ডিজিটাল সিগন্যালের মাধ্যমে যোগাযোগ করা হয় যা এনালগ সিগন্যালে ওভারলেড করা হয়।
ডিজিটাল সিগন্যালে ডিভাইসের তথ্য যেমন ডিভাইসের অবস্থা, ডায়াগনস্টিকস, গণনা করা মান ইত্যাদি অন্তর্ভুক্ত থাকে। তাই যৌথভাবে, দুটি যোগাযোগ চ্যানেল একটি খুব শক্তিশালী এবং কম খরচের যোগাযোগ সমাধান অফার করে যা ব্যবহার করা এবং কনফিগার করা খুবই সহজ। এই প্রোটোকলটিকে প্রায়শই একটি হাইব্রিড প্রোটোকল বলা হয় কারণ এটি এনালগ এবং ডিজিটাল যোগাযোগ উভয়ই একত্রিত করে।
HART প্রযুক্তিকে একটি মাস্টার/স্লেভ প্রোটোকল হিসাবে আলাদা করা হয় কারণ স্লেভ ডিভাইসটি শুধুমাত্র একবার কাজ করে যখন একটি মাস্টার ডিভাইস এটির সাথে সংযুক্ত হয়। এখানে, স্লেভ ডিভাইস একটি স্মার্ট ডিভাইস, এবং মাস্টার ডিভাইস একটি কম্পিউটার।
HART প্রোটোকলের মোড
সাধারণত, HART প্রোটোকলের মধ্যে যোগাযোগের জন্য, নেটওয়ার্কের মধ্যে ব্যবহৃত ডিভাইস হল PLC বা ডিস্ট্রিবিউটেড কন্ট্রোল সিস্টেম যা মাস্টার হিসাবে বেছে নেওয়া হয় যেখানে অন্যান্য ফিল্ড ডিভাইসগুলি সেন্সর বা অ্যাকচুয়েটরদের মতো দাস হিসাবে বিবেচিত হয়। কিন্তু এখানে মাস্টার এবং ক্রীতদাসের মধ্যে যোগাযোগ প্রধানত যোগাযোগের পদ্ধতির উপর নির্ভর করে যেখানে সিস্টেমটি সাজানো হয়েছে। HART প্রোটোকল নেটওয়ার্ক দুটি মোডে যোগাযোগ করে যেমন মাস্টার/স্লেভ মোড এবং বার্স্ট মোড।
মাস্টার/স্লেভ মোড
এই মোডটি অনুরোধ-প্রতিক্রিয়া মোড হিসাবেও পরিচিত। এই ধরনের মোডে, মাস্টার ডিভাইস থেকে একটি অনুরোধ জারি হলে স্লেভ ডিভাইসগুলি কেবল ডেটা প্রেরণ করে। প্রতিটি HART লুপের জন্য, দুটি মাস্টার সংযুক্ত করা যেতে পারে। তাই প্রাথমিক মাস্টার সাধারণত একটি ডিসিএস (ডিস্ট্রিবিউটেড কন্ট্রোল সিস্টেম), পিসি (পার্সোনাল কম্পিউটার), বা পিএলসি (প্রোগ্রামেবল লজিক কন্ট্রোলার) যেখানে সেকেন্ডারি মাস্টার হল অন্য একটি পিসি বা হ্যান্ডহেল্ড টার্মিনাল। স্লেভ ডিভাইসগুলি হল অ্যাকচুয়েটর, কন্ট্রোলার এবং ট্রান্সমিটার যা মাস্টার ডিভাইসের আদেশে প্রতিক্রিয়া দেখায়।
বিস্ফোরিত মোড
কিছু HART প্রোটোকল-সক্ষম ডিভাইস কেবল এই যোগাযোগ মোড সমর্থন করে। এই মোডটি প্রতি সেকেন্ডের জন্য তিন থেকে চারটি ডেটা আপডেটের মতো দ্রুত যোগাযোগের অনুমতি দেয়। এই মোডে মাস্টার ডিভাইস ক্রমাগত একটি সাধারণ HART উত্তর বার্তা প্রেরণ করার জন্য স্লেভ ডিভাইসকে নির্দেশ দেয়। মাস্টার দ্রুত গতিতে বার্তা পায় যতক্ষণ না এটি ক্রীতদাসকে ফেটে যাওয়া বন্ধ করার আদেশ দেয়। এই মোডটি প্রযোজ্য যেখানে উপরের একটি HART ডিভাইসটি HART লুপ থেকে যোগাযোগের জন্য প্রয়োজনীয়।
হার্ট প্রোটোকল বনাম মডবাস
HART প্রোটোকল এবং Modbus মধ্যে পার্থক্য নিম্নলিখিত অন্তর্ভুক্ত.
|
HART প্রোটোকল |
মডবাস |
| HART একটি হাইব্রিড প্রোটোকল। | Modbus একটি ডেটা কমিউনিকেশন প্রোটোকল। |
| HART ব্যাপকভাবে প্রসেস এবং ইন্সট্রুমেন্টেশন সিস্টেমে ব্যবহৃত হয় যা ছোট অটোমেশন থেকে অত্যন্ত জটিল শিল্প অ্যাপ্লিকেশন পর্যন্ত। | মডবাস সাধারনত ইন্সট্রুমেন্টেশন এবং কন্ট্রোল ডিভাইস থেকে ডাটা সংগ্রহ করার সিস্টেম বা প্রধান নিয়ামকের কাছে সংকেত প্রেরণের জন্য ব্যবহৃত হয়। |
| এই প্রোটোকল দুটি অপারেশনাল মোডে কাজ করে যেমন পয়েন্ট টু পয়েন্ট এবং মাল্টি-ড্রপ। | মডবাস দুটি ট্রান্সমিশন মোডে কাজ করে যেমন ASCII মোড বা RTU মোড। |
সুবিধাদি
দ্য HART প্রোটোকলের সুবিধা নিম্নলিখিত অন্তর্ভুক্ত.
- HART প্রোটোকল দ্বারা সক্ষম করা ডিভাইসগুলি ব্যবহারকারীদের তাদের কার্যক্ষম ক্ষমতা অপ্টিমাইজ করার জন্য ডিভাইসটিকে সর্বোত্তম ডেটা ব্যবহার করার অনুমতি দেয়।
- এটি হওয়ার আগে সম্ভাব্য সমস্যাগুলিকে স্বীকৃতি দিয়ে সরঞ্জামের ব্যর্থতার কারণে এটি ডাউনটাইম হ্রাস করে।
- এটি ডিভাইসের ইনভেন্টরি খরচ এবং রক্ষণাবেক্ষণ হ্রাস করে।
- এটি সমস্যা সনাক্তকরণ এবং সমস্যা সমাধানের জন্য অপেক্ষার সময় হ্রাস করে।
- এটি উন্নত ডায়গনিস্টিক ব্যবহার করে নিরাপত্তা অখণ্ডতার মাত্রা বাড়ায়।
- HART প্রোটোকল বেছে নেওয়ার সুবিধাগুলির মধ্যে প্রধানত অন্তর্ভুক্ত রয়েছে; ডিজিটাল ক্ষমতা, এনালগ ক্ষমতা, প্রাপ্যতা এবং আন্তঃকার্যক্ষমতা।
- এই প্রোটোকলটি বিভিন্ন ডিভাইস এবং সেন্সরগুলির সাথেও ব্যবহার করা যেতে পারে।
- HART প্রোটোকল-ভিত্তিক ডিভাইসগুলি শিল্পগুলিতে ব্যাপকভাবে গৃহীত হয়।
- এই প্রোটোকল সিস্টেমের প্রাপ্যতা, অগ্রগতির নিয়মিততা ইত্যাদি বাড়ায়।
অসুবিধা
দ্য HART প্রোটোকলের অসুবিধা নিম্নলিখিত অন্তর্ভুক্ত.
- HART ট্রান্সমিশনের মধ্যে ডিজিটাল সংকেত মোটামুটি ধীর।
- একটি মাল্টি-ড্রপ বিন্যাসের জন্য, অ্যানালগ সংকেত অ্যাক্সেসযোগ্য নয় এবং নং। ট্রান্সমিশন লাইন বিভক্ত করতে পারে এমন ডিভাইসগুলির মধ্যে সীমাবদ্ধ।
- এটি যেকোনো সময় শুধুমাত্র একটি প্রক্রিয়া পরিবর্তনশীল নিরীক্ষণ করতে পারে।
- প্রোফিবাস এবং ফাউন্ডেশন ফিল্ডবাসের মতো অন্যান্য ফিল্ডবাস সিস্টেমের তুলনায় এই ধরণের প্রোটোকল কিছুটা ধীর। তাই এই ধীর প্রতিক্রিয়া সময় কিছু শিল্প-ভিত্তিক অ্যাপ্লিকেশনের মধ্যে কিছু অসুবিধা সৃষ্টি করে।
- সাধারণত, HART প্রোটোকলের গতি সরল পর্যবেক্ষণ সিস্টেমের জন্য যথেষ্ট যেখানে প্রক্রিয়া ভেরিয়েবলগুলি দ্রুত পরিবর্তিত হয় না।
অ্যাপ্লিকেশন
দ্য HART প্রোটোকলের অ্যাপ্লিকেশন নিম্নলিখিত অন্তর্ভুক্ত.
- স্মার্ট ডিভাইস এবং কন্ট্রোল সিস্টেমের মধ্যে অ্যানালগ ওয়্যারিং সহ ডিজিটাল ডেটা প্রেরণ এবং গ্রহণ করতে HART প্রোটোকল বিশ্বব্যাপী ব্যবহৃত হয়।
- এটি শিল্প অটোমেশনে ব্যবহৃত একটি খুব জনপ্রিয় প্রোটোকল।
- এই প্রোটোকলটি মূলত স্মার্ট ডিভাইস বিশ্লেষণের জন্য।
- এটি প্রসেস এবং ইন্সট্রুমেন্টেশন সিস্টেমে ব্যাপকভাবে ব্যবহৃত হয়।
- এই ধরনের কমিউনিকেশন প্রোটোকল মাল্টিভেরিয়েবল যন্ত্রের জন্য আদর্শ যার মধ্যে ভর ফ্লো মিটার রয়েছে যেখানে ভলিউমেট্রিক প্রবাহ, ভর প্রবাহ, ঘনত্ব এবং তাপমাত্রা একটি একক তারের মাধ্যমে নিয়ন্ত্রণ ব্যবস্থার দিকে যোগাযোগ করা যেতে পারে।
- এই প্রোটোকলটি মূলত শিল্প প্রক্রিয়া নিয়ন্ত্রণ এবং পরিমাপ অ্যাপ্লিকেশনগুলিতে ব্যবহারের জন্য ডিজাইন করা হয়েছে।
- HART প্রোটোকল প্রধানত বিভিন্ন ডিভাইসের মধ্যে যোগাযোগের জন্য প্রক্রিয়া শিল্পে ব্যবহৃত হয়।
সুতরাং, এই একটি HART প্রোটোকলের অপারেশন . এই প্রোটোকল হল বিশ্বব্যাপী স্ট্যান্ডার্ড যা স্মার্ট ফিল্ড ডিভাইসের পাশাপাশি ডিসিএস এবং পিএলসি সিস্টেমের মতো মনিটরিং বা কন্ট্রোল সিস্টেমগুলির মধ্যে অ্যানালগ ওয়্যার জুড়ে ডিজিটাল ডেটা প্রেরণ ও গ্রহণের জন্য ব্যবহৃত হয়। এই দ্বিমুখী যোগাযোগ প্রোটোকলটি কেবল ক্ষেত্র এবং হোস্ট কন্ট্রোলারের মধ্যে একটি হ্যান্ডহেল্ড ডিভাইস থেকে একটি অ্যাসেট ম্যানেজমেন্ট সিস্টেম বা প্ল্যান্ট কন্ট্রোলারের মধ্যে অতিরিক্ত ডেটা প্রবেশের অধিকার প্রদান করে। এখানে একটি প্রশ্ন: HART প্রোটোকলের পূর্ণ রূপ কী?