এই যুগে শিল্প স্বয়ংক্রিয়তা , উত্পাদনের সুনির্দিষ্ট এবং উন্নত মানের জন্য রোবটগুলি বিভিন্ন প্রক্রিয়া পরিচালনা করার জন্য ব্যবহৃত হয়। বিশেষত শিল্পের জন্য রোবট ডিজাইনের সময় নিখুঁত রোবটের জন্য আদর্শ মোটর নির্বাচন করা সবসময় একটি শক্ত কাজ। সঠিক নির্বাচন বৈদ্যুতিক মোটর শিল্প রোবটগুলিতে বাহু নিয়ন্ত্রণ, অবস্থান, কৌণিক এবং রৈখিক গতিবিধির জন্য অ্যাকাউন্ট নিতে বিভিন্ন পরামিতি প্রয়োজন।

শিল্প রোবোটিক্সে ব্যবহৃত মোটর ors
মোটর নির্বাচন রোবোটিক্স শখের জন্য ন্যূনতম উপলব্ধি করা ধারণা যা কৌশলগতকরণ এবং গুরুতর বিশ্লেষণের প্রয়োজন t এটি রোবটের গতি, ত্বরণ, রোবটের ওজন, চক্রের আকার এবং প্রয়োগের উপর ভিত্তি করে টর্কের প্রয়োজনীয়তা নির্ধারণের সাথে জড়িত। যেখানে বিভিন্ন ধরণের মোটর রয়েছে T আজকের বাজারে উপলব্ধ তবে বেশিরভাগই ক্ষুদ্র পেজার মোটর, servo মোটর , লিনিয়ার মোটর, স্টিপার মোটর এবং ডিসি গিয়ার মোটরগুলি তাদের প্রয়োগের অঞ্চল অনুযায়ী শিল্পকৌশল রোবটে ব্যবহৃত হয়।
প্রতিবন্ধী রোবট সহ মোটরটির অপ্রয়োজনীয় নির্বাচন শেষ হয় তাই সমস্ত বাস্তবসম্মত স্পেসিফিকেশনকে মাথায় রেখে শিল্প রোবটগুলিকে বাস্তব, নির্ভুল এবং সমস্ত শিল্প প্রক্রিয়াকরণের চাহিদা মেটাতে যথেষ্ট করে তুলতে কোন ধরণের মোটর সেরা এবং উপযুক্ত?
আমরা এখানে শিল্প অ্যাপ্লিকেশনগুলির জন্য নির্বাচিত হওয়ার জন্য উপযুক্ত মোটর বেছে নেওয়ার জন্য শিল্প পেশাদারদের কাছ থেকে এই মোটরটির কিছু অন্তর্দৃষ্টি সংগ্রহ করেছি।
আমরা আপনাকে বিশেষজ্ঞের মতামত অনুসরণ করতে উত্সাহিত করি যা রবোটের সুনির্দিষ্ট, ব্যয়বহুল এবং নির্ভরযোগ্য আন্দোলনের জন্য উপলব্ধ ডিসি, স্টিপার, ব্রাশহীন এবং সার্ভো মোটর দিয়ে শিল্প রোবোটিক্সের জন্য সর্বোত্তম মোটর সরবরাহ করার লক্ষ্যে রয়েছে।
চ.সম্পথ কুমার
ভিএলএসআই ডিজাইনে এম
প্রযুক্তিগত বিষয়বস্তু লেখক
 অবিচ্ছিন্ন ক্রিয়াকলাপের জন্য ডিসি মোটরগুলি বিস্তৃত পরিসরে পাওয়া যায় তবে সংশ্লিষ্ট অ্যাপ্লিকেশনটির জন্য স্যুটগুলির জন্য এটি গিয়ার হ্রাস প্রয়োজন। স্টেপার মোটরটিকে কোনও গিয়ার হ্রাসের প্রয়োজন হয় না কারণ এটির পদক্ষেপযুক্ত ক্রিয়াটি নির্দিষ্ট অ্যাপ্লিকেশনগুলির জন্য কম গতি সরবরাহ করে। সর্বশেষে সার্ভো মোটরগুলি সুনির্দিষ্ট এবং সঠিক নিয়ন্ত্রণের জন্য ব্যবহৃত হয় যা বন্ধ লুপ ক্রিয়াকলাপে প্রয়োগ করা হয়। তবে এটির জন্য অতিরিক্ত প্রতিক্রিয়া এবং ড্রাইভিং সার্কিটির প্রয়োজন তাই এটি ডিসি এবং স্টেপার মোটরের চেয়ে ব্যয়বহুল। সুতরাং সার্ডো মোটরগুলি তার সঠিক গতির কারণে রোবটটিকে আরও নির্ভরযোগ্য করে তোলে।
অবিচ্ছিন্ন ক্রিয়াকলাপের জন্য ডিসি মোটরগুলি বিস্তৃত পরিসরে পাওয়া যায় তবে সংশ্লিষ্ট অ্যাপ্লিকেশনটির জন্য স্যুটগুলির জন্য এটি গিয়ার হ্রাস প্রয়োজন। স্টেপার মোটরটিকে কোনও গিয়ার হ্রাসের প্রয়োজন হয় না কারণ এটির পদক্ষেপযুক্ত ক্রিয়াটি নির্দিষ্ট অ্যাপ্লিকেশনগুলির জন্য কম গতি সরবরাহ করে। সর্বশেষে সার্ভো মোটরগুলি সুনির্দিষ্ট এবং সঠিক নিয়ন্ত্রণের জন্য ব্যবহৃত হয় যা বন্ধ লুপ ক্রিয়াকলাপে প্রয়োগ করা হয়। তবে এটির জন্য অতিরিক্ত প্রতিক্রিয়া এবং ড্রাইভিং সার্কিটির প্রয়োজন তাই এটি ডিসি এবং স্টেপার মোটরের চেয়ে ব্যয়বহুল। সুতরাং সার্ডো মোটরগুলি তার সঠিক গতির কারণে রোবটটিকে আরও নির্ভরযোগ্য করে তোলে।
বিশ্বনাথ প্রতাপ
বৈদ্যুতিক বিদ্যুত ইঞ্জিনিয়ারিংয়ে এম.টেক
প্রযুক্তিগত বিষয়বস্তু লেখক

বাছাই এবং স্থান রোবটগুলি সাধারণত একটি অবস্থান বা স্থান থেকে কোনও জিনিস বাছাই করতে এবং এটি অন্য অবস্থান বা স্থানে স্থাপন করার জন্য শিল্পগুলিতে পাওয়া যায়। এই উদ্দেশ্যে, রোবটগুলির জয়েন্টগুলির কৌণিক গতিবিধিগুলি নিয়ন্ত্রণ করা দরকার যা সার্ভো মোটর ব্যবহার করে অর্জন করা যায়। এই সার্ভো মোটরগুলি রোবোটের জয়েন্টগুলি কার্যকর করার জন্য রোবোটিক নিয়ামক দ্বারা প্রদত্ত পিডব্লিউএম ডেটা ব্যবহার করে নিয়ন্ত্রণ করা হয়। সার্ভো মোটরগুলি কোনও বস্তুর অবস্থান থেকে দ্রুত স্থানান্তরিত করতে পর্যাপ্ত টর্ক তৈরি করতে সক্ষম। সুতরাং, এগুলি সামরিক এবং শিল্প রোবোটিক যানগুলিতে চাকা হিসাবে ব্যবহৃত হয়। স্টিপার মোটরগুলি পজিশন নিয়ন্ত্রণের জন্যও ব্যবহৃত হতে পারে তবে এগুলি কেবলমাত্র লকিং এবং কমান্ডের অবস্থান ধরে রাখার জন্য বিশ্রামের সময়কালে শক্তি গ্রহণ করবে। সুতরাং, servo মোটর সাধারণত স্টিপার মোটরগুলির একটি উচ্চ কার্যকারিতা বিকল্প হিসাবে শিল্প রোবোটিকগুলিতে ব্যবহৃত হয়।
এস নরেশ রেড্ডি
এম্বেড সিস্টেমে এমটেক
প্রকল্প গাইড
যান্ত্রিক রোবটের কাঠামোটি পারফিউতে নিয়ন্ত্রিত করতে হবে  আরএম টাস্ক রোবট নিয়ন্ত্রণের জন্য তিনটি ভিন্ন ধাপ রয়েছে যেমন উপলব্ধি, প্রক্রিয়াজাতকরণ এবং ক্রিয়া। সেন্সরগুলি তার জয়েন্টগুলির অবস্থান এবং এটির সমাপ্তি সম্পর্কে রোবোটকে তথ্য দেয়, তারপরে এই তথ্যটি নিয়ন্ত্রণ ইউনিটে প্রক্রিয়াকরণ করা হয় এবং মোটরটিকে যথাযথ সংকেত গণনা করে যা যান্ত্রিকভাবে চলে। বিশাল সংখ্যক রোবট বৈদ্যুতিন মোটর ব্যবহার করে। বারবার ব্রাশহীন এবং ব্রাশযুক্ত ডিসি মোটরগুলি বহনযোগ্য রোবোটগুলিতে ব্যবহৃত হয় এবং এসি মোটর শিল্প রোবোটগুলিতে ব্যবহৃত হয়। এই মোটরগুলিকে হালকা লোডযুক্ত সিস্টেমে অগ্রাধিকার দেওয়া হয় এবং যেখানে গতির মূল প্রভাবটি ঘোরানো হয়।
আরএম টাস্ক রোবট নিয়ন্ত্রণের জন্য তিনটি ভিন্ন ধাপ রয়েছে যেমন উপলব্ধি, প্রক্রিয়াজাতকরণ এবং ক্রিয়া। সেন্সরগুলি তার জয়েন্টগুলির অবস্থান এবং এটির সমাপ্তি সম্পর্কে রোবোটকে তথ্য দেয়, তারপরে এই তথ্যটি নিয়ন্ত্রণ ইউনিটে প্রক্রিয়াকরণ করা হয় এবং মোটরটিকে যথাযথ সংকেত গণনা করে যা যান্ত্রিকভাবে চলে। বিশাল সংখ্যক রোবট বৈদ্যুতিন মোটর ব্যবহার করে। বারবার ব্রাশহীন এবং ব্রাশযুক্ত ডিসি মোটরগুলি বহনযোগ্য রোবোটগুলিতে ব্যবহৃত হয় এবং এসি মোটর শিল্প রোবোটগুলিতে ব্যবহৃত হয়। এই মোটরগুলিকে হালকা লোডযুক্ত সিস্টেমে অগ্রাধিকার দেওয়া হয় এবং যেখানে গতির মূল প্রভাবটি ঘোরানো হয়।
সুরেশ মেগাজী
ওয়্যারলেস যোগাযোগ ব্যবস্থাতে এম। টেক
প্রযুক্তিগত বিষয়বস্তু লেখক

আপনি যদি ‘রোবোটিকস’ এবং তাদের ‘শিল্পে’ প্রয়োগে যুক্ত হতে চান, তবে রোবোটিক্সে ব্যবহৃত ‘মোটর’ সম্পর্কে আপনার জানা উচিত কারণ রোবোটিকগুলি বেশিরভাগ মোটর নির্ভর করে as মূলত ‘রোবোটিক মেশিন’ উত্পাদনে বিভিন্ন অ্যাপ্লিকেশনের জন্য ব্যবহৃত হয়। বিভিন্ন ‘মোটর’ যেমন ডিসি, পালসড, স্টিপার, অপটিকাল ড্রাইভ, আংশিক টার্ন এবং হল এফেক্ট মোটর ইত্যাদি… শিল্পগুলিতে প্রয়োগ করার জন্য এবং তাদের বন্ধুত্বপূর্ণ করার মতো কিছু কৌশল ব্যবহার করে ব্যবহৃত হয়
- ডিসি মোটরগুলি ব্যাটারি ভিত্তিক অ্যাপ্লিকেশন, ধীর গতি, গতিশীলতার অ্যাপ্লিকেশনগুলির জন্য ব্যবহৃত হয়।
- যেখানেই আমাদের ঘূর্ণনমুখী অ্যাপ্লিকেশন প্রয়োজন, আমরা স্টিপার মোটর যেমন ইউনিপোলার এবং বাইপোলার মোটর ব্যবহার করতে পারি।
- মাথা এবং বাহু চলাচলের জন্য, আমরা আংশিক টার্ন মোটর ব্যবহার করতে পারি।
- যদি আমরা চৌম্বকীয় ক্ষেত্রগুলি ব্যবহার করতে চাই তবে আমরা হল এফেক্ট এবং অপটিক্যাল ড্রাইভ মোটর ইত্যাদি ব্যবহার করতে পারি
স্মার্ট মোটর ব্যবহার করে এমন রোবোটিক্স ব্যবহার করে আমরা অর্থ, সময়, স্থান, বিপজ্জনক আন্দোলন ইত্যাদি সঞ্চয় করতে পারি
অজয় সাহারে
বিপণন নির্বাহী

শিল্প রোবটগুলি শিল্প উত্পাদন পরিবেশে ব্যবহৃত হয়। এগুলি ওয়েল্ডিং, উপাদান হ্যান্ডলিং, পেইন্টিং এবং অন্যান্য হিসাবে যেমন অ্যাপ্লিকেশন জন্য বিশেষত বিকাশিত অস্ত্র।
শিল্প পরিবেশে ব্যবহৃত প্রতিটি মেচাট্রনিক ডিভাইসকে রোবট হিসাবে বিবেচনা করা যায় না। আইএসও (আন্তর্জাতিক স্ট্যান্ডার্ড অর্গানাইজেশন) দ্বারা সংজ্ঞায়িত হিসাবে একটি স্বয়ংক্রিয়ভাবে নিয়ন্ত্রিত, পুনঃপ্রণয়নযোগ্য, বহুমুখী ম্যানিপুলেটর প্রোগ্রামিংয়েবল তিন বা ততোধিক অক্ষগুলিতে শিল্প রোবট হিসাবে বিবেচিত হয়।
শিল্প রোবোটিক্স ব্যবহৃত মোটর হয়
- অল্টারনেটিং কারেন্ট (এসি) মোটর
- ডাইরেক্ট-কারেন্ট (ডিসি) মোটর
- সার্ভো মোটরস
- স্টিপার মোটরস
1. এসি মোটরগুলিকে আরও অ্যাসিনক্রোনাস এবং সিঙ্ক্রোনাস ধরণের মধ্যে বিভক্ত করা যেতে পারে। উদাহরণস্বরূপ, আনয়ন এসি মোটর একটি অ্যাসিনক্রোনাস টাইপ ইউনিট যা মূলত একটি তারের ক্ষত স্ট্যাটার এবং একটি রটার সমন্বিত of পাওয়ারটি তারের সাথে সংযুক্ত থাকে এবং এর মধ্য দিয়ে প্রবাহিত এসি কারেন্টটি কয়েলযুক্ত তারে একটি বৈদ্যুতিন চৌম্বক (EM) ক্ষেত্রকে প্ররোচিত করে, একটি শক্তিশালী পর্যাপ্ত ক্ষেত্র যা রটার গতির জন্য শক্তি সরবরাহ করে। সিঙ্ক্রোনাস মোটরগুলি ধ্রুবক-গতির মোটর যা এসি লাইন ফ্রিকোয়েন্সি সহ সিঙ্ক্রোনিজমে পরিচালিত হয় এবং সাধারণত ব্যবহৃত হয় যেখানে নির্দিষ্ট ধ্রুবক গতির প্রয়োজন হয়।
২. রোবোটিক্স সহ অনেকগুলি শিল্পকৌশল অ্যাপ্লিকেশন প্রায়শই ডিসি মোটর ব্যবহার করে কারণ গতি এবং দিক নিয়ন্ত্রণ করার সুবিধার্থে। এগুলি সম্পূর্ণ গতি থেকে শূন্য পর্যন্ত বিস্তৃত বোঝা সহ একটি সীমাহীন গতির সীমাতে সক্ষম।
যেহেতু ডিসি মোটরগুলিতে জড়ের তুলনায় একটি উচ্চ অনুপাত রয়েছে, তারা নিয়ন্ত্রণ সংকেতগুলির পরিবর্তনে দ্রুত প্রতিক্রিয়া জানাতে পারে। একটি ডিসি মোটর মসৃণভাবে শূন্য গতিতে নিয়ন্ত্রণ করা যায় এবং তত্ক্ষণাত জটিল বিদ্যুৎ স্যুইচিং সার্কিটরির প্রয়োজন ছাড়াই বিপরীত দিকে ত্বরান্বিত করা যায়। স্থায়ী-চৌম্বক ব্রাশহীন ডিসি মোটর সাধারণত ব্রাশ ধরণের চেয়ে বেশি ব্যয়বহুল, যদিও তারা বিদ্যুৎ খরচ এবং নির্ভরযোগ্যতার ক্ষেত্রে সুবিধা সরবরাহ করতে পারে।
কোনও পরিবহন ছাড়াই ব্রাশহীন মোটর প্রচলিত ডিসি মোটরগুলির চেয়ে আরও দক্ষ ও উচ্চ গতিতে পরিচালনা করতে পারে। বেশিরভাগ ব্রাশহীন ডিসি মোটর ট্র্যাপিজয়েডাল এসি তরঙ্গরূপে চালিত হয় তবে কয়েকটি মোটর সাইন ওয়েভগুলি দিয়ে পরিচালনা করে। সাইন ওয়েভ চালিত ব্রাশহীন মোটর কম টর্ক রিপল সহ কম গতি সম্পন্ন অপারেশন অর্জন করতে পারে, সেগুলি পিষে ফেলা, আবরণ এবং অন্যান্য অ্যাপ্লিকেশন যেমন পৃষ্ঠ সমাপ্তির জন্য আদর্শ করে তোলে।
ব্রাশযুক্ত ডিসি মোটরগুলির ক্ষেত্রে, আপনি যদি নিজের মোটরটি শক্তি না হারাতে ধীর গতিতে ঘুরতে চান তবে আপনি পালসের প্রস্থের মড্যুলেশন (পিডাব্লুএম) ব্যবহার করতে পারেন। এর মূল অর্থ মোটরটি খুব দ্রুত চালু এবং বন্ধ করা। এইভাবে, মোটরটি নিম্ন গতিতে এমনভাবে ঘোরায় যেন বিদ্যুতের যত্ন না নিয়ে লো ভোল্টেজ প্রয়োগ করা হয়।
মূলত, ব্রাশযুক্ত ডিসি মোটর দ্বারা উত্পাদিত টর্ক খুব ছোট এবং গতিটি কার্যকর হওয়ার পক্ষে খুব দুর্দান্ত। সুতরাং, গিয়ার হ্রাস সাধারণত গতি হ্রাস এবং টর্ক বাড়াতে ব্যবহৃত হয়।
৩. সার্ভো মোটরগুলি ডিজিটাল কন্ট্রোলারের সাথে ক্লোজড লুপ সিস্টেমে ব্যবহৃত হয়। নিয়ামকটি একটি ড্রাইভার পরিবর্ধককে বেগ কমান্ড প্রেরণ করে, যার ফলে সার্ভো মোটরটি ফিড হয়। প্রতিক্রিয়া ডিভাইসের কিছু ফর্ম, যেমন একটি সমাধানকারী বা এনকোডার, সার্ভো মোটরের অবস্থান এবং গতি সম্পর্কিত তথ্য সরবরাহ করে। রিসলভার বা এনকোডার মোটরের সাথে একীভূত হতে পারে বা দূরবর্তী স্থানে থাকতে পারে। ক্লোড-লুপ সিস্টেমের কারণে, একটি সার্ভো মোটর একটি নির্দিষ্ট গতি প্রোফাইলের সাথে পরিচালনা করতে পারে যা নিয়ামকের মধ্যে প্রোগ্রামযুক্ত।
৪. স্টিপার মোটরগুলি ছোট কৌণিক পদক্ষেপে বিভক্ত মোটরটির আবর্তনের সাথে, প্রতিক্রিয়ার সাথে বা ছাড়াই পরিচালনা করতে পারে। এটি পালস কমান্ড সিগন্যাল দ্বারা নিয়ন্ত্রিত হয় এবং ব্রেক বা ক্লাচ অ্যাসেমব্লির প্রয়োজন ছাড়াই কমান্ড পয়েন্টে অবধি থামতে পারে। যখন শক্তি সরানো হয়, একটি স্থায়ী চৌম্বকীয় স্টিপার মোটর সাধারণত তার শেষ অবস্থানে থাকে। একাধিক স্টিপার মোটরগুলিকে একটি সাধারণ উত্স থেকে চালিত করে সিঙ্ক্রোনাইজেশনে বজায় রাখা যায়।
দেব দেশাই
বিপণন নির্বাহী 
আপনি যদি রোবোটিক্সের সাথে জড়িত হওয়ার পরিকল্পনা করেন তবে আপনাকে উপলব্ধ প্রচুর পরিমাণে মোটরগুলির সাথে নিজেকে পরিচিত করতে হবে, সমস্ত রোবোটিক চলাচল একরকম বা অন্য কোনওভাবে মোটর চালিত হয়, সুতরাং আপনার বিকল্পটি কী তা জানা গুরুত্বপূর্ণ।
ডিসি মোটরস
ব্যাটারি চালিত হওয়া ছাড়াও, ডিসি মোটরটির চলাফেরার দিকটি পাওয়ার ইনপুটটির পোলারিটি দ্বারা নির্ধারিত হয়। এটি রোবোটিক ক্রিয়াকলাপগুলির জন্য একটি চূড়ান্ত প্রয়োজনীয়তা। ভাগ্যক্রমে, এই ধরণের মোটর বিভিন্ন আকারের, ভোল্টেজের প্রয়োজনীয়তার সাথে আসে এবং সর্বত্র পাওয়া যায়।
বিভিন্ন ধরণের মোটর নীচে হিসাবে রয়েছে
- গতিশীলতা বেস মোটর
- হাই স্পিড শখ মোটর
- বেল্ট ড্রাইভ মোটর
- স্লট গাড়ি মোটর
- নাড়ি পরিচালিত
- আর্ম অভিযোজিত মোটর
- পয়েন্টার সহ বাইপোলার স্টিপার
বায়ো মোটর
জৈব ধাতু একটি আশ্চর্যজনক পদার্থ যা প্রায় কয়েক বছর ধরে রয়েছে এবং এটির রোবোটিক্সের ক্ষেত্রে বেশ কয়েকটি অ্যাপ্লিকেশন রয়েছে। উদাহরণস্বরূপ আমরা দেখতে পাচ্ছি, বায়ো-মেটাল তারের একটি টুকরো দৈর্ঘ্যের পাঁচ শতাংশ সঙ্কুচিত হবে যখন পুরো কয়েকটি ভোল্টটি প্রয়োগ করা হবে। পরীক্ষার কয়েক বছর পরে, বায়ো-ওয়্যার শক্তিশালী, নির্ভরযোগ্য হিসাবে প্রমাণিত হয়েছে এবং নতুন পণ্যগুলির উত্থানের সাথে সাথে আরও দরকারী হয়ে উঠছে। এর কিছুটা ধীর গতির প্রতিক্রিয়া সময় এটি রোবোটিক আর্ম এবং হ্যান্ড অ্যাপ্লিকেশনগুলির জন্য আদর্শ করে তোলে, যেখানে ঝাঁকুনির সমস্যা হবে। একটি রোবোটিক আর্মের পুরো দৈর্ঘ্য প্রসারিত করার সময় তারের একটি দীর্ঘ টুকরা একটি উল্লেখযোগ্য আন্দোলন তৈরি করতে পারে। বাণিজ্যিক বাজারে বর্তমানে রোবোটিক আর্ম কিট রয়েছে যা বায়ো ধাতু ব্যবহার করে।
রিলে
রোবোটিক্সে রিলে প্রায়শই কম্পিউটারের কার্যকারিতা থেকে বিদ্যুৎ সরবরাহ থেকে মোটরগুলির জন্য বোঝানো শক্তি আলাদা করতে ব্যবহৃত হয়। মোটরগুলি, তাদের কম প্রতিবন্ধকতার কারণে, বিদ্যুৎ সরবরাহে ভারী বর্তমান চাহিদা তৈরি করে এবং একাধিক গ্লিট তৈরি করে যা কম্পিউটার সহ্য করতে পারে না। সুতরাং কেবল মোটরগুলির জন্য পৃথক উচ্চতর বর্তমান উত্স ব্যবহার করা ভাল ধারণা idea
সোলোনয়েডস
স্যানোলয়েডগুলি ম্যানিপুলেটর নিয়ন্ত্রণ ডিভাইস বা সুইচ অপারেটর হিসাবে সেরা ব্যবহৃত হয়। তাদের চলাচল দ্রুত এবং শক্তিশালী, তাই ক্রিয়াটি নরম করার জন্য একটি বসন্ত প্রায় সবসময় গ্র্যাস্পারে ব্যবহৃত হয়। উদাহরণস্বরূপ আপনি দেখতে পাচ্ছেন, নিয়ন্ত্রণের তারগুলি গ্রস্পারটি বন্ধ করতে ব্যবহৃত হয়। এই নিয়ন্ত্রণ তারগুলি রিটার্ন স্প্রিং হিসাবেও কাজ করতে পারে। এর মতো গ্র্যাসারগুলি উত্পাদন লাইন কাজের ক্ষেত্রে আরও বেশি পাওয়া যায় যেখানে টাস্কটি খুব পরিমাপ করা হয় এবং সংকীর্ণ পরামিতিগুলি কভার করে।
সেকেন্ডারি ফাংশন
বেশিরভাগ মোটর ফাংশনগুলির মধ্যে গতিশীলতা, বাহু, মাথা বা অন্য কিছু দৃশ্যমান বাহ্যিক চলাচল জড়িত থাকে তবে কিছু মোটর চলাচল এত দৃশ্যমান হয় না। বৃহত শিল্প রোবটগুলি হাইড্রোলিক সিস্টেমগুলি ব্যবহার করে যা জলবাহী তরলের একটি অপারেটিং চাপ তৈরি করতে পাম্প মোটর ব্যবহার করে। মোটরগুলির আরেকটি গুরুত্বপূর্ণ গৌণ কাজ হ'ল নিয়ন্ত্রিত নিয়ন্ত্রণ। নির্ভুলতার উন্নতি করতে, মোটরগুলির সাথে ইন্টারফেস করা পন্টিওমিটারগুলি সাধারণত মাল্টি-টার্ন ডিভাইস হয়।
উপসংহার
রোবটগুলি বেশ জটিল ডিভাইস হতে পারে যা বিভিন্ন ধরণের মোটর চালিত চলাচলের প্রয়োজন হয়। এই নিবন্ধটি বোঝানো হচ্ছে আপনি রোবট নির্মাতা হিসাবে যে ডিভাইসগুলির সাথে লেনদেন করছেন তার পরিসীমা সম্পর্কে একটি সংক্ষিপ্ত বিবরণ দেওয়া। রোবোটিক সরঞ্জাম সরবরাহকারী এবং উপলব্ধ সরবরাহের উপর গবেষণা করে শুরু করা ভাল ধারণা হবে। এখন প্রচুর পরিমাণে পণ্য উপলভ্য রয়েছে এবং ইন্টারনেট এটি সন্ধান, শিখতে এবং ব্যবহার সহজ করে তোলে। আপনার প্রয়োজন যাই হোক না কেন, একটি সামান্য দক্ষতা এবং সমস্ত রোবট নির্মাতাদের মনে হয় যে দৃ determination় সংকল্পটি আপনাকে ভালভাবে পরিবেশন করা উচিত।
সমাদান ওয়ান্ড্রে
বিপণন নির্বাহী
'রোবোটিক্সে ব্যবহৃত মোটর'
- গতিশীলতা বেস মোটর

- হাই স্পিড শখ মোটর
- বেল্ট ড্রাইভ মোটর
- স্লট গাড়ি মোটর
- নাড়ি পরিচালিত
- আর্ম অভিযোজিত মোটর
- পয়েন্টার সহ বাইপোলার স্টিপার

বৃহত্তর মোটরগুলি গতিশীলতা ঘাঁটির জন্য সর্বোত্তম উপযুক্ত যা রোবটগুলি ভূখণ্ডকে চালিত করতে দেয়। এগুলির কয়েকটি মোটর গিয়ারবক্সগুলি নিয়ে আসে গতিশীলতার জন্য প্রয়োজনীয় ধীর গতি এবং টর্ক produce মোটরে ভোল্টেজ কমিয়ে আনতে এটি আরও আকাঙ্ক্ষিত গতিতে ধীর করতে পারে। কেবলমাত্র পরীক্ষাগুলি নির্ধারণ করতে পারে যে আপনার মোটর কম ভোল্টেজের সাথে চালিত হবে। যদি এটি হয় তবে আপনি নিজেকে অনেক ঝামেলা বাঁচিয়েছেন, যদি তা না হয় তবে মোটর স্লো করার অন্যান্য উপায় রয়েছে। কীট গিয়ারস বা স্ক্রু গিয়ারগুলি ব্যবহার করা হলে কয়েকটি উচ্চ-গতির মোটর ব্যবহার করা যেতে পারে।
স্ক্রু গিয়ার একটি উদাহরণ রোবোটিক আর্ম ইলাস্ট্রেশনে দেখা যায়। যখন মোটরটি ঘড়ির কাঁটার দিকে ঘুরায় বল্ট সমাবেশটি মোটর এবং আর্মের চুক্তিতে টানা হয় এবং যখন এটি ঘড়ির কাঁটার বিপরীতে পরিণত হয় তখন বাহু প্রসারিত হয়। যদিও মোটর শ্যাফ্টটি দ্রুত পরিণত হচ্ছে, স্ক্রু হ্রাসের কারণে আর্ম ক্রিয়াটি যথেষ্ট ধীর হয়ে গেছে this নিম্নলিখিত মোটর সার্কিটের উদাহরণে আমরা একটি পাওয়ার ট্রানজিস্টর দ্বারা নিয়ন্ত্রিত একটি ডিসি মোটর দেখতে পাই। একটি রিলে সুইচ (ডাবল মেরু ডাবল নিক্ষেপ), দিক নির্ধারণ করে। ট্রানজিস্টার কিউ 1 মোটরের ভারী বোঝা নিতে পাওয়ার ট্রানজিস্টার হওয়া উচিত।
স্পন্দিত মোটর
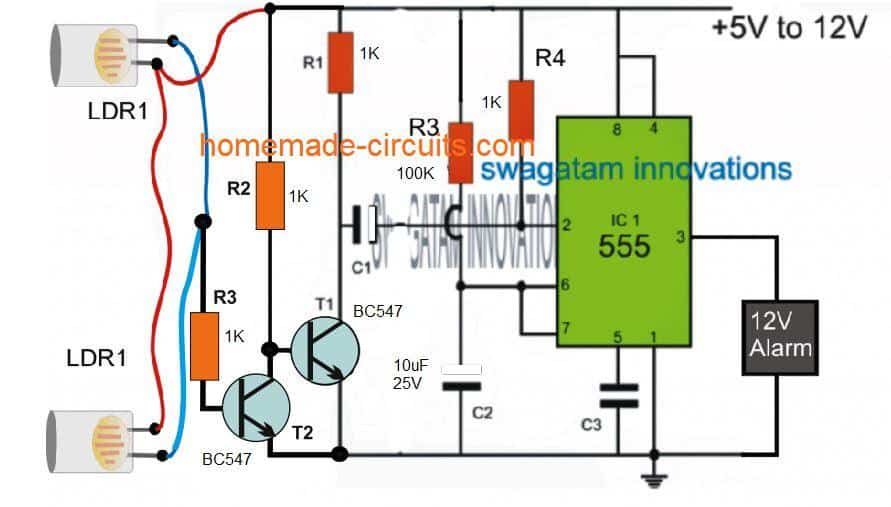
কিছু মোটর স্পন্দিত ডিসি সিগন্যাল থেকে অপারেটিং করে গতি হ্রাস পেতে পারে। এই সিগন্যালটি প্রায় একশ হার্জেড হয়। নাড়ির প্রস্থ পরিবর্তন করে নাড়ির প্রস্থ পরিবর্তন করে মোটরের গতি পরিবর্তন করা যায়। এগুলির মতো মোটরগুলি উদ্বৃত্ত ইলেকট্রনিক্সের দোকানে পাওয়া যায় এবং এটির সাথে সংযুক্ত নাড়ি জেনারেটর দ্বারা সহজেই চিহ্নিত করা যায়। যে কোনও ডিসি মোটর একটি নাড়ি উত্স দ্বারা চালিত করা যেতে পারে, এবং যেমন একটি সার্কিট এর স্কিম্যাটিক অন্তর্ভুক্ত করা হয়।
আপনি দেখতে পাচ্ছেন যে 555 টাইমারটি ড্রাইভ দোলক হিসাবে বেছে নেওয়া হয়েছিল, যা প্রায় 100 হার্জ হার্টের ফ্রিকোয়েন্সি উত্পাদন করে। প্রতিরোধক আর 1, এবং ক্যাপাসিটার সি, মোটর দ্বারা উত্পাদিত স্পাইকগুলি থেকে ডাল জেনারেটরকে স্থিতিশীল এবং বিচ্ছিন্ন করে। যেহেতু এই ডিভাইসটি 6 থেকে 12 ভোল্টের পাওয়ার সরবরাহ থেকে আঁকতে পারে, আপনি কী ভোল্টেজ ব্যবহার করেন তার উপর নির্ভর করে আপনি আরও ভাল ফলাফলের জন্য ক্যাপাসিটার সি 4 এবং সি 6 এর মান পরিবর্তন করতে পারেন। ডাল আউটপুট আইসি 1 এর তিনটি পিন থেকে নেওয়া হয় এবং আইসি 2 এর দুটি পিনকে খাওয়ানো হয়, এটি 555 টাইমারও।
দ্বিতীয় টাইমারটি পেন্টিওমিটার আর 5 এবং রেজিস্টর আর 6 এর মাধ্যমে ক্যাপাসিটর সি 6 -কে ভোল্টেজের সাথে সামঞ্জস্য করে নাড়িটির প্রস্থের দৈর্ঘ্য পরিবর্তিত করে। নাড়ির সময়কাল যা মোটরের গতি নির্ধারণ করে এবং ডাল প্রস্থটি 10% থেকে 100% এ সামঞ্জস্য করা যায়।
ট্রানজিস্টার কিউ 1 রেজিস্টার আর 7 এর মাধ্যমে নাড়ি প্রস্থের মডুলেটেড সিগন্যাল গ্রহণ করে। যেহেতু কিউ 1 কম বর্তমান ডিভাইস, এটি কিউ 2, এমন একটি বিদ্যুৎ ট্রানজিস্টরকে সংকেত দেয় যা মোটরের বর্তমান চাহিদাগুলি পরিচালনা করতে পারে। এই ট্রানজিস্টরগুলি সমালোচক নয় এবং প্রায় কোনও ধরণের নিম্ন-বর্তমান পাওয়ার ট্রানজিস্টর কাজ করবে। রিলে মোটরটি কী দিকে নেবে তা নির্ধারণ করবে।
স্টিপার মোটরস
সমস্ত মোটরগুলির মধ্যে সবচেয়ে জটিল হ'ল স্টেপার মোটর। নাম infers এর মত, মোটর ডিগ্রী বৃদ্ধি হয় এবং পালস পরিচালিত হয়। প্রতি ধাপে টার্নের সঠিক ডিগ্রি এক উত্পাদনকারী বা মডেল থেকে অন্যটিতে পরিবর্তিত হতে পারে তবে 20 ডিগ্রি জনপ্রিয় এবং একটি সম্পূর্ণ পালনের জন্য 18 টি পদক্ষেপ উত্পাদন করে। স্টিপার মোটর দুটি ধরণের রয়েছে, বাইপোলার এবং ইউনিপোলার। আপনি স্টিপার মোটর স্কিমেটিক হিসাবে দেখতে পাচ্ছেন, দ্বিপদীটি কেবল একটি দুটি কয়েল চালিত মোটর।
ইউনিপোলার প্রকারটি সেন্টার টেপ সহ দুটি কয়েল। যদি কেন্দ্রের কলগুলি উপেক্ষা করা হয় তবে ইউনিপোলার মোটর বাইপোলার প্রকার হিসাবে কাজ করতে পারে। স্টিপার মোটরের দুটি কয়েলকে কয়েল থেকে কয়েল পর্যন্ত ধীরে ধীরে ধীরে ধীরে ডাল দেওয়া হয়। মোটর ক্রিয়াকে গ্রাফিকালি উপস্থাপনের জন্য কার্যকারী চিত্রটিতে এই প্রক্রিয়াটির একটি মানচিত্র সরবরাহ করা হয়। প্রচলিত ডিসি মোটরগুলির বিপরীতে, টর্ক গতিতে হ্রাস পায়। স্টিপার মোটরকে এগিয়ে নিতে একটি বিশেষ ধরণের ড্রাইভ ইউনিটও প্রয়োজন এবং মোটর সরবরাহ করা উচিত। মোটরটিকে একটি ভাল স্পট শীট সরবরাহ করা হয় না যা উপাদানগুলির প্রস্তাবনা এবং পূর্ণ স্কিম্যাটিকযুক্ত থাকে তবে আপনি একটি নিয়ন্ত্রণ ইউনিট তৈরি করার পরামর্শ দেওয়া হয় না।
মোটরটিকে ড্রাইভ সিস্টেম থেকে এটি বিচ্ছিন্ন করার জন্য বাফারগুলির প্রয়োজন হতে পারে, বা এটির জন্য পৃথক বিদ্যুত সরবরাহ প্রয়োজন হতে পারে। প্রয়োজন যাই হোক না কেন, এগুলি একটি মোটর থেকে অন্য মোটর থেকে আলাদা হতে পারে। শখের দোকানগুলি স্টিপার মোটরগুলির সবচেয়ে নির্ভরযোগ্য সরবরাহকারী এবং উদ্বৃত্ত ইলেকট্রনিক স্টোরগুলি মাঝে মধ্যে থাকতে পারে তবে সেগুলি প্রয়োজনীয় নির্দিষ্ট তথ্য অন্তর্ভুক্ত করতে পারে না
আংশিক টার্ন মোটর
কিছু রোবোটিক ফাংশনগুলির জন্য কেবল মাথা বা বাহুর চলাচলের মতো একটি আংশিক বাঁক প্রয়োজন require এগুলি অর্জনের সবচেয়ে সহজ উপায় হ'ল অবস্থান স্টপ এবং স্লিপ গিয়ার্স। এই ধরণের মোটরের যান্ত্রিক বিবরণগুলির একটি চিত্র উপরে সরবরাহ করা হয়েছে। মাইক্রো-স্যুইচগুলি পাওয়ার বন্ধ করতে এবং পরবর্তী ক্রিয়াটির জন্য দিকটি পুনরায় সেট করতে স্টপ সেন্সর হিসাবে ব্যবহার করা যেতে পারে।
নীচের চাকাটি মোটরের সাথে সংযুক্ত থাকে যখন শীর্ষ চাকাটি অনুভূতির একটি বৃত্তাকার টুকরা দ্বারা নীচের চাকাটি থেকে পৃথক করা হয়। নীচের চাকাটি যখন ঘুরিয়ে দেয় তখন স্টপ পিনটি মাইক্রো-স্যুইচের সংস্পর্শে না আসা পর্যন্ত শীর্ষ চাকাটি তার সাথে ঘুরবে। কিছু ডিজাইন মোটর থামানোর জন্য বিধান করে না, তাই স্পেসার সহ সহজ স্ক্রু মোটর স্টপ হিসাবে কাজ করবে।
বায়ো-মোটর
জৈব ধাতু একটি আশ্চর্যজনক পদার্থ যা প্রায় কয়েক বছর ধরে রয়েছে এবং এটির রোবোটিক্সের ক্ষেত্রে বেশ কয়েকটি অ্যাপ্লিকেশন রয়েছে। উদাহরণস্বরূপ আমরা দেখতে পাচ্ছি, বায়ো-মেটাল তারের একটি টুকরো দৈর্ঘ্যের পাঁচ শতাংশ সঙ্কুচিত হবে যখন পুরো কয়েকটি ভোল্টটি প্রয়োগ করা হবে। কয়েক বছর ধরে পরীক্ষার পরে, বায়ো-ওয়্যার শক্তিশালী, নির্ভরযোগ্য হিসাবে প্রমাণিত হয়েছে এবং নতুন পণ্যগুলির উত্থানের সাথে সাথে আরও দরকারী হয়ে উঠছে। এর কিছুটা ধীর গতির প্রতিক্রিয়া সময় এটি রোবোটিক আর্ম এবং হ্যান্ড অ্যাপ্লিকেশনগুলির জন্য আদর্শ করে তোলে, যেখানে ঝাঁকুনির সমস্যা হবে। একটি রোবোটিক আর্মের পুরো দৈর্ঘ্য প্রসারিত করার সময় তারের একটি দীর্ঘ টুকরা একটি উল্লেখযোগ্য আন্দোলন তৈরি করতে পারে। বাণিজ্যিক বাজারে বর্তমানে রোবোটিক আর্ম কিট রয়েছে যা বায়ো ধাতু ব্যবহার করে।
ভাস্কর সিং
বিপণন নির্বাহী
 শিল্প রোবট হ'ল এমন একটি ডিভাইস যা নির্দিষ্ট পরিমাণে মানব গতিকে বিপদ হ্রাস করার পাশাপাশি আরও শক্তি, নির্ভুলতা এবং ধারাবাহিকতা সরবরাহ করে uplic তাদের অপারেশনাল মোড, কন্ট্রোলিং, ব্যবহৃত সরঞ্জাম এবং সম্পাদন করার জন্য কাজের উপর নির্ভর করে তাদের বিস্তৃত মোটর চালিত চলনগুলির প্রয়োজন। একটি শিল্প রোবোটিক মোটর একটি নির্দিষ্ট কাজে বিশেষীকরণের জন্য স্বাভাবিক মোটরগুলির তুলনায় বিস্তৃত শুল্ক পরিচালনা করার সম্ভাবনা থাকা উচিত।
শিল্প রোবট হ'ল এমন একটি ডিভাইস যা নির্দিষ্ট পরিমাণে মানব গতিকে বিপদ হ্রাস করার পাশাপাশি আরও শক্তি, নির্ভুলতা এবং ধারাবাহিকতা সরবরাহ করে uplic তাদের অপারেশনাল মোড, কন্ট্রোলিং, ব্যবহৃত সরঞ্জাম এবং সম্পাদন করার জন্য কাজের উপর নির্ভর করে তাদের বিস্তৃত মোটর চালিত চলনগুলির প্রয়োজন। একটি শিল্প রোবোটিক মোটর একটি নির্দিষ্ট কাজে বিশেষীকরণের জন্য স্বাভাবিক মোটরগুলির তুলনায় বিস্তৃত শুল্ক পরিচালনা করার সম্ভাবনা থাকা উচিত।
উচ্চ দক্ষ পাওয়ার সোর্সিং এবং তুলনামূলক সহজ ডিজাইনিংয়ের কারণে বৈদ্যুতিক মোটর সর্বাধিক ব্যবহৃত হয় যা এগুলি ইনস্টলিং, রক্ষণাবেক্ষণ এবং সার্ভিসিং - সমস্ত ক্ষেত্রে ব্যয়-থেকে-পারফরম্যান্স রেটিংয়ের ক্ষেত্রে আরও জনপ্রিয় বিকল্প হিসাবে তৈরি করে।
প্রয়োজনীয় কাজের উপর নির্ভর করে বিভিন্ন মোটর বিভিন্ন উদ্দেশ্যে ব্যবহৃত হয়। উদাহরণস্বরূপ, ডিসি মোটরগুলি ঘড়ির কাঁটা এবং অ্যান্টিલોকওয়াইজ দিকগুলিতে চলার জন্য ব্যবহৃত হয়, উদাহরণগুলি ক্রেন এবং উত্তোলনগুলিতে থাকে, পালস মোটরগুলি ডিসি পালসের প্রস্থ ব্যবহার করে স্পন্দিত আন্দোলন সরবরাহ করতে ব্যবহৃত হয়, আংশিক টার্ন মোটরগুলি মাথা এবং বাহুর মতো চলন সরবরাহ করার জন্য ব্যবহৃত হয় এবং সবচেয়ে জটিল একটি - স্টিপার মোটর ডিগ্রী বৃদ্ধিতে স্টেপড টার্ন সরবরাহ করতে ব্যবহৃত হয়।
তদতিরিক্ত, কাজের ধরণের উপর নির্ভর করে, বিভিন্ন রেটিং এবং আকারগুলির মোটর বিভিন্ন উদ্দেশ্যে ব্যবহৃত হয় work কাজ এবং রোবটের নকশার উপর নির্ভর করে মোটর বিভিন্ন ধরণের বিভিন্ন স্থানে রয়েছে।
মোহন কৃষ্ণ। এল
বিক্রয় ও সহায়তা নির্বাহী
রোবটগুলি সেই কাজটি করতে ব্যবহৃত হয় যা মানুষের দ্বারা করা যেতে পারে এবং রোবটগুলি মানুষের চেয়ে ভাল হওয়ার কারণ রয়েছে। 
রোবট দুটি প্রধান ধরণের তারা হ'ল: -
মোবাইল রোবট: যে পা বা ট্র্যাক উপর সরানো।
স্টেশনারী রোবট: এটির একটি নির্দিষ্ট বেস রয়েছে।
স্টেশনারি রোবট সাধারণত রোবট আর্মসকে অবজেক্টগুলি বাছাই করতে বা অন্য কোনও কাজ করার জন্য ব্যবহার করা যেতে পারে যার মধ্যে কোনও বস্তুর কাছে পৌঁছানো জড়িত।
একটি রোবট আর্মের তিনটি মূল অংশ রয়েছে: -
- কাঁধ যুগ্ম
- কব্জি জয়েন্ট
- স্থির বেস
এর জন্য একটি রোবট দরকার
- দ্রুত এবং বিপজ্জনক পরিবেশে কাজ করার ক্ষমতা।
- কাজগুলি বারবার পুনরাবৃত্তি করার ক্ষমতা।
- নির্ভুলভাবে কাজ করার ক্ষমতা।
- বিভিন্ন কাজ করার ক্ষমতা।
- দক্ষতা.
মোটর একটি ডিভাইস যা বৈদ্যুতিক শক্তিকে যান্ত্রিক শক্তিতে রূপান্তর করে, যেমন, বৈদ্যুতিন-যান্ত্রিক ডিভাইস। দুটি ধরণের মোটর যেমন এসি মোটর এবং ডিসি মোটর রয়েছে
শিল্প রোবোটিক্সে ব্যবহৃত মোটর হ'ল সার্ভো মোটর। সার্ভো মোটরটি সরো মেকানিজমের সাহায্যে নিয়ন্ত্রিত একটি সাধারণ বৈদ্যুতিক মোটর I যদি নিয়ন্ত্রিত মোটরটি এসি দ্বারা পরিচালিত হয় তবে এটিকে এসি সার্ভো মোটর বলা হয় অন্যথায় ডিসি সার্ভো মোটর ost মোস্ট সার্ভো মোটরগুলি প্রায় 90 থেকে 180 ডিগ্রি ঘোরানো যায় ven একটি সম্পূর্ণ 360 ডিগ্রি বা তারও বেশি Rob রোবোটিক্সের সার্ভো মোটরের অ্যাপ্লিকেশনগুলির কয়েকটি হ'ল
- রোবোটিক এ সার্ভো মোটর অ্যাপ্লিকেশন, যেমন একটি সাধারণ পিক এবং প্লেস রোবট, এটি এক অবস্থান থেকে কোনও জিনিস বাছাই করতে এবং বস্তুকে বিভিন্ন অবস্থানে রাখার জন্য ব্যবহৃত হয়।
- পরিবাহকগুলিতে সার্ভো মোটর ব্যবহৃত হয়
- শিল্প উত্পাদন এবং ইউনিট একত্রিত করার জন্য এক বিধানসভা কেন্দ্র থেকে অন্য সমাবেশে একটি অবজেক্ট পাস করা হয়। প্রাক্তন হিসাবে: - একটি বোতল পূরণ প্রক্রিয়া।
- রোবোটিক গাড়িতে সার্ভো মোটর এখানে চাকাতে ব্যবহৃত সার্ভো মোটর। যেহেতু অবিচ্ছিন্ন ঘূর্ণন সার্ভো মোটর ব্যবহৃত হয়।
দীনেশ.পি
বিপণন নির্বাহী
 মানুষের কঠোর পরিশ্রম হ্রাস করতে এবং ভবিষ্যতের উন্নতির জন্য মানুষের ভাগ্য উন্নয়নে সহায়তা করতে রোবট চালু করা হয়। রোবট শব্দটি মেশিনকে বোঝায় যা বিভিন্ন মানব বৈশিষ্ট্যের নকল করে। রোবোটিক্সে মেকানিকাল, ইলেকট্রনিক্স, বৈদ্যুতিক ও কম্পিউটার বিজ্ঞান প্রকৌশল সম্পর্কিত জ্ঞান অন্তর্ভুক্ত থাকে। রোবটগুলিতে ব্যবহৃত মোটর হলেন ডিসি মোটর, স্টিপার মোটরস এবং সার্ভো মোটর
মানুষের কঠোর পরিশ্রম হ্রাস করতে এবং ভবিষ্যতের উন্নতির জন্য মানুষের ভাগ্য উন্নয়নে সহায়তা করতে রোবট চালু করা হয়। রোবট শব্দটি মেশিনকে বোঝায় যা বিভিন্ন মানব বৈশিষ্ট্যের নকল করে। রোবোটিক্সে মেকানিকাল, ইলেকট্রনিক্স, বৈদ্যুতিক ও কম্পিউটার বিজ্ঞান প্রকৌশল সম্পর্কিত জ্ঞান অন্তর্ভুক্ত থাকে। রোবটগুলিতে ব্যবহৃত মোটর হলেন ডিসি মোটর, স্টিপার মোটরস এবং সার্ভো মোটর
কোথায়,
- ডিসি মোটর অবিচ্ছিন্ন ঘূর্ণনের জন্য ব্যবহৃত হয়
- স্টিপার মোটরগুলি কয়েকটি ডিগ্রীতে ঘোরার জন্য ব্যবহৃত হয়
- সার্ভো মোটরগুলি পজিশনিংয়ের জন্য ব্যবহৃত হয়, এটি গাড়ি এবং প্লেনে ব্যবহার করতে পারে
গণেশ .জে
বিপণন নির্বাহী 
রোবট এমন কাজ করতে ব্যবহৃত হয় যা মানুষের দ্বারা করা যেতে পারে এবং মানুষের প্রচেষ্টা এবং সময়কে হ্রাস করে এবং মান উন্নত করে industrial শিল্প রোবোটিক্সে ব্যবহৃত মোটরগুলি হ'ল
- অল্টারনেটিং কারেন্ট (এসি) মোটর
- ডাইরেক্ট-কারেন্ট (ডিসি) মোটর
- সার্ভো মোটরস
- স্টিপার মোটরস