পোস্টটিতে এমন একটি পদ্ধতি ব্যাখ্যা করা হয়েছে যা সম্ভবত কোনও স্ট্যাটিক বা স্টেশনারি মানুষের উপস্থিতি সনাক্ত করতে প্যাসিভ ইনফ্রারেড সেন্সর ক্ষমতা বাড়ানোর জন্য ব্যবহার করা যেতে পারে। প্রচলিত পিআইআর সেন্সরগুলির মাধ্যমে এই বৈশিষ্ট্যটি সাধারণত সম্ভব হয় না।
কীভাবে পিআইআর মানব উপস্থিতি সনাক্ত করে
আমি ইতিমধ্যে এই ওয়েবসাইটে অনেক পিআইআর ভিত্তিক গতি সনাক্তকারী অ্যাপ্লিকেশনগুলি নিয়ে আলোচনা করেছি, তবে এই সমস্ত অ্যাপ্লিকেশনগুলির পিআইআর তাদের উপস্থিতি সনাক্তকরণের জন্য ক্রমাগতভাবে মানুষের উপস্থিতি প্রয়োজন, এটি একটি বড় অসুবিধা বলে মনে হচ্ছে যা এই ইউনিটগুলি সংবেদন থেকে আটকাচ্ছে ts একটি ধ্রুবক বা স্থির মানবিক পেশা।
তবে উপরোক্ত বর্ণিত ব্যর্থতার পিছনে কারণ রয়েছে। প্রচলিত পিআইআর সেন্সরগুলি তাদের সম্মুখ লেন্সের উপর দুটি সমান্তরাল স্লটের মাধ্যমে একটি মানব দেহ থেকে আইআর সংকেতগুলি সংবেদন করে কাজ করে এবং এর অভ্যন্তরীণ সার্কিটারি তখনই সক্রিয় হয় যখন আইআর সিগন্যালগুলি এই সংবেদনশীল স্লটগুলির ('দৃষ্টিভঙ্গি') এর মধ্যে অতিক্রম করে।
সেন্সিং স্লটগুলিতে আইআর সিগন্যালগুলি অতিক্রম করা পিআইআর সার্কিটকে তথ্য দুটি একই রকমের ডালগুলিতে অনুবাদ করতে সক্ষম করে, যা পিআর এর আউট পিনে ট্রিগার ভোল্টেজ তৈরি করতে সংশোধিত হয়।
পিআইআর স্টেশনারি লক্ষ্য সনাক্ত করতে পারে না
এটি সূচিত করে যে আইআর উত্স যদি গতিহীন থাকে তবে এটি পিআইআর মডিউলটিকে তার আউটপুট পিন জুড়ে কোনও ট্রিগার উত্পাদন করতে অনুরোধ করবে না। এটি সূচিত করে যে উত্স থেকে আইআর সিগন্যালটি কোনওভাবে প্রদত্ত পিআইআর সনাক্তকরণ স্লটগুলি অতিক্রম করে জোনটির মধ্যে থাকা কোনও প্রদত্ত মানুষের অনুভূতি বোঝাতে সক্ষম হয়।
দেখে মনে হচ্ছে এটির জন্য কোনও প্রত্যক্ষ বা সহজ প্রতিকার নেই, কারণ পিআইআর মডিউলগুলি এর জন্য অভ্যন্তরীণভাবে সংশোধন করা যায় না, যা ইউনিটকে স্থায়ী মানুষের উপস্থিতি সনাক্তকরণ থেকে পঙ্গু করে।
তবে একটি যৌক্তিক পালন আমাদের জানিয়েছে যে এটির পরিবর্তিত আইআর উত্স যদি পিআইআর মডিউলকে সক্রিয় রাখতে প্রয়োজন হতে পারে তবে কেন পিআইআরকে বিষয়টির পরিবর্তে স্থির গতিতে থাকতে বাধ্য করবেন না।
নিম্নলিখিত জিআইএফ সিমুলেশন থেকে ধারণাটি ভিজ্যুয়ালাইজ করা যেতে পারে, যা একটি দোলনকারী পিআইআর মডিউল এবং সনাক্তকারী অঞ্চলে একটি স্থির মানুষ দেখায়।

এখানে আমরা দেখতে পাচ্ছি যে একটি দোলনকারী পিআইআর কীভাবে সমস্যার সাথে খাপ খাইয়ে নিয়ে যায় এবং নিজেকে স্থির আইআর বিষয়গুলি সনাক্ত করতে সক্ষম করে তা নিজেকে রূপান্তর করে।
এটি সম্ভব হয়েছে কারণ তার আন্দোলনের মাধ্যমে পিআইআর মডিউলটি স্থির আইআর উত্সকে তার দুটি গ্রহণের স্লট জুড়ে অবিচ্ছিন্নভাবে আইআর ইমেজিংয়ে রূপান্তরিত করে।
ধারণাটি জটিল দেখায়, তবে এটি ধীরে ধীরে PWM নিয়ন্ত্রিত মোটর সার্কিট ব্যবহার করে সহজেই সমাধান করা যায়।
আমরা নিম্নলিখিত বিভাগগুলিতে পুরো প্রক্রিয়া এবং সার্কিটের বিশদটি শিখব।
যেমনটি আমরা ইতিমধ্যে আলোচনা করেছি, প্রচলিত পিআইআর মডিউলগুলি কেবল চলমান জীবন্ত বস্তু সনাক্ত করতে সক্ষম হয় এবং স্থির লক্ষ্য সনাক্ত করতে পারে না যা এর প্রয়োগটিকে কেবল মানব গতি সনাক্তকারী হিসাবে সীমাবদ্ধ করে তোলে।
অ্যাপ্লিকেশনগুলির জন্য যেখানে মোটিওলেসগুলির জন্য মানুষের দখল সনাক্তকরণ যেমন পরিস্থিতিগুলিতে প্রয়োজনীয় হয়ে ওঠে একটি প্রচলিত পিআইআর অকেজো হয়ে যেতে পারে, এবং নিজেকে আপগ্রেড করার জন্য কিছু বাহ্যিক ব্যবস্থা প্রয়োজন হতে পারে।
মোশনলেস লক্ষ্যগুলি সনাক্ত করতে পিআইআর ডিজাইন করা
উপরের অংশে আমরা শিখেছি যে লক্ষ্যটি গতিশীল হওয়ার পরিবর্তে পিআইআর মডিউলটি নিজেই পছন্দসই স্থিতিশীল লক্ষ্য সনাক্তকরণ বাস্তবায়নের জন্য প্রদত্ত ব্যাসার্ধের উপরে সরানো যেতে পারে।
নিম্নলিখিত বিভাগগুলিতে আমরা একটি সাধারণ সার্কিট প্রক্রিয়া সম্পর্কিত শিখি যা প্রস্তাবিত দোলনগুলির জন্য একটি ছোট ডিসি মোটরের উপরে লাগানো একটি পিআইআর ব্যবহার করা যেতে পারে।
পিডব্লিউএম / ফ্লিপ ফ্লপ নিয়ন্ত্রিত মোটর ড্রাইভার
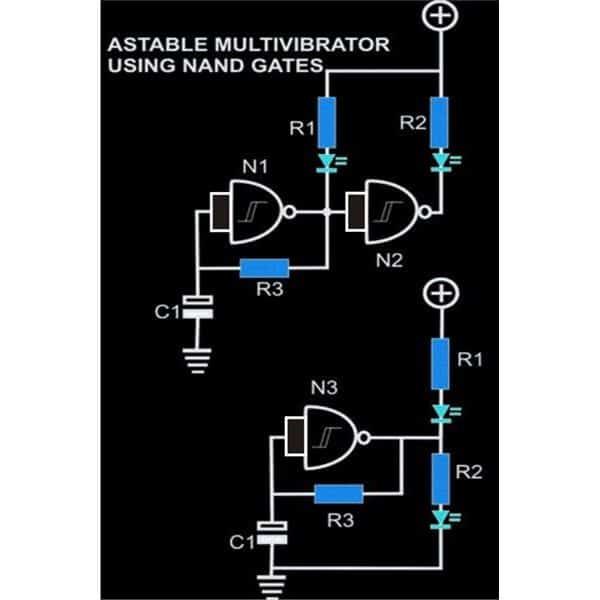
সিস্টেমটি মূলত প্রয়োজন একটি পিডব্লিউএম নিয়ন্ত্রিত গতি নির্ধারণ এবং একটি ফ্লিপ ফ্লপ পরিবর্তন ওভার মোটর জন্য। নিম্নলিখিত চিত্রটি দেখায় যে কীভাবে একটি সাধারণ সার্কিটের সাহায্যে এই বৈশিষ্ট্যগুলি পিআইআর মোটর হিসাবে চিহ্নিত করা যায়:

প্রদর্শিত সার্কিটটি একটি একক আইসি HEF40106 হেক্স ইনভার্টিং স্কিমেট গেট আইসি ব্যবহার করে যার মধ্যে 6 ইনভার্টার নট গেট রয়েছে includes
গেটস এন 1 এবং এন 2 একটি সামঞ্জস্যযোগ্য পিডব্লিউএম আউটপুট উত্পাদন করতে কনফিগার করা হয়েছে যা বাফারগুলি তৈরি করে গেটস এন 4, এন 5, এন 6 সরবরাহ করা হয়।
এই বাফার গেটগুলি থেকে সাধারণ আউটপুট একটি মোটর ড্রাইভার মোসফেটের গেটে সমাপ্ত হয়।
পিডাব্লুএম কনটেন্টটি পি 1 এর সহায়তায় সেট করা হয়েছে, যা শেষ পর্যন্ত ডিপিডিটি রিলে পরিচিতিগুলির একটি সেটের মাধ্যমে সংযুক্ত মোটরে প্রয়োগ করা হয়।
এই রিলে পরিচিতিগুলি মোটর চলাফেরার দিকটি নির্ধারণ করে (ঘড়ির কাঁটার দিকে বা অ্যান্টিক্লোকওয়াইস)
এই ফ্লিপ ফ্লপ ডিপিডিটি রিলে পরিচিতিগুলি গেট এন 3 এর চারপাশে কনফিগার করা একটি চমত্কার টাইমার দ্বারা নিয়ন্ত্রিত হয়, যেখানে ক্যাপাসিটার সি 3 / আর 3 নির্ধারণ করে যে মোটরটিকে তার ঘূর্ণন দিকটি ধারাবাহিকভাবে পরিবর্তন করার জন্য রিলে কী হারে পরিবর্তন প্রয়োজন।
উপরের নকশাটি মোটরকে প্রদত্ত র্যাডিয়াল অঞ্চল জুড়ে প্রয়োজনীয় ধীর গতিতে চলতে এবং চালিত করার অনুমতি দেয়।
প্রতি 5 থেকে 6 সেকেন্ডের পরে সি 3 টি পরিবর্তনের সূচনা করার জন্য নির্বাচন করা যেতে পারে এবং একটি অত্যন্ত আলস্য মোটর চলাচল সক্ষম করতে পিডব্লিউএম সামঞ্জস্য করা যেতে পারে, কারণ এটি কেবলমাত্র নিশ্চিত করা দরকার যে লক্ষ্যমাত্রার আইআর সিগন্যালগুলিতে পিআইআর স্লটগুলি অতিক্রম করবে ensure যথা সময়ে.
তবে মোটর অপারেশনটি ধীর হওয়ার কারণে, পিআইআর থেকে আউটপুটটি টাইম অফ অফ টাইমারের মাধ্যমে টিকিয়ে রাখতে হবে যাতে সংযুক্ত লোডটি অফ এবং অন পরিবর্তন না করে, যখন মোটর চলাচল পর্যায়ক্রমে মানব পেশা থেকে আইআর লাইনগুলি কেটে দেয়।
বিলম্ব টাইমার
পরবর্তী বিলম্ব টাইমার সার্কিট স্টেজ ব্যবহার করা যেতে পারে যা নিশ্চিত করে যে প্রতিটি সময় পিআইআর আউটপুট সংবেদনশীল নাড়ি তৈরি করে, টাইমার থেকে বিলম্বটি 5 থেকে 10 সেকেন্ডের জন্য বাড়ানো হয় এবং সংযুক্ত লোড প্রক্রিয়া চলাকালীন কখনই বাধা পায় না।

উপরের সেট আপে আমরা মোটরটি দেখতে পাই যা পূর্ববর্তী অনুচ্ছেদে আলোচিত হিসাবে পিডব্লিউএম / ফ্লিপ ফ্লপ পর্যায় থেকে তার বৈদ্যুতিক ড্রাইভ সরবরাহ গ্রহণ করে।
মোটরটির স্পিন্ডেলটি এক অনুভূমিক খাদের সাথে একত্রে দেখা যায় যার উপরে পিআইআর ক্ল্যাম্প করা হয়, যেমন যখন মোটরটি চলে যায়, পিআইআর একটি যথাযথভাবে পরিবর্তনশীল রেডিয়াল থেকে এবং ফ্রো গতির মধ্য দিয়ে যায়।
উপরের পিআইআর গতি প্ররোচিত হওয়ার সাথে সাথে জোনের স্থির লক্ষ্যমাত্রা থেকে আইআর সিগন্যালগুলি সংক্ষিপ্ত বিকল্প ডাল আকারে সনাক্ত করা হয়, যা নীল তারের সাহায্যে নির্দেশিত পিআইআরের আউটপুট পিনে উত্পন্ন হয়।
এই ডালগুলি 1000uF ক্যাপাসিটার জুড়ে প্রয়োগ করা হয় যা প্রতিটি নাড়ির সাথে চার্জ করে এবং প্রক্রিয়া চলাকালীন কোনও বিঘ্ন ছাড়াই বিসি 547৪ চালনা মোডে রাখে তা নিশ্চিত করে।
বিসি 557 পর্যায়ের সমন্বয়ে থাকা রিলে ড্রাইভার বিসি 547৪ সংগ্রাহকের কাছ থেকে উপরের স্থিতিশীল সংকেতটিতে সাড়া দেয় এবং ফলস্বরূপ পিআইআর যতক্ষণ না মানুষের উপস্থিতি সনাক্ত করে ততক্ষণ রিলে চালিয়ে যায়।
এই অঞ্চলে স্থির মানুষের উপস্থিতির কারণে রিলে লোড অবিচ্ছিন্নভাবে সক্রিয় থাকে।
তবে যদি মানুষের দখল সরিয়ে নেওয়া হয় বা লক্ষ্যটি অঞ্চল থেকে দূরে সরে যায়, তবে বিলম্বের টাইমার পর্যায়টি রিলে এবং লোডটি নির্ধারিত 5 থেকে 10 সেকেন্ডের জন্য সক্রিয় রাখে যার পরে এটি স্থায়ীভাবে বন্ধ হয়ে যায়, যতক্ষণ না জোনটি আবার ধরা না যায় একটি সম্ভাব্য আইআর উদ্ভূত উত্স দ্বারা।
যন্ত্রাংশের তালিকা
- আর 1, আর 4 = 10 কে
- আর 2 = 47 ওএইচএমএস
- পি 1 = 100 কে পট
- ডি 1, ডি 2 = 1 এন 4148
- ডি 3 = এমওআর 1560
- সি 1, সি 2 = 0.1uF / 100V
- জেড 1 = 15 ভি, 1/2 ওয়াট
- Q1 = IRF540
- প্রশ্ন 2 = বিসি 577
- এন 1 --- এন 6 = আইসি এমএম 74 সি 14
- ডিপিডিটি = ডিপিএসটি সুইচ বা ডিপিডিটি রিলে
- কিছু পরীক্ষা এবং ত্রুটি দ্বারা নির্ধারিত হতে R3, C3
হালনাগাদ:
স্থিতিশীল মানুষের উপস্থিতি সনাক্তকরণের জন্য উপরোক্ত বর্ণিত পিআইআর সার্কিটটি নিম্নোক্ত জিআইএফ সিমুলেশনটিতে চিত্রিত হিসাবে একটি সিগন্যাল চপার সার্কিট নিয়োগ করে অনেক সরল করা যেতে পারে:
একটি সাবধানে পরিদর্শন দেখায় যে আসলে একটি দোলক আন্দোলন সহজভাবে প্রয়োজন হয় না, মোটর এবং হেলিকপ্টার ফলকটি অবিচ্ছিন্নভাবে ঘোরাতে দেওয়া যেতে পারে নিম্ন স্তরে মোটর গতি ।
এটি কার্যকরভাবে স্থিতিশীল পিআইআর সেন্সিং অপারেশন কার্যকরভাবে সম্পন্ন করবে।

ভিডিও ডেমো একটি পিআইআর জন্য স্থির মানব সনাক্তকরণ প্রমাণ করে
পূর্ববর্তী: 3 সাউন্ড অ্যাক্টিভেটেড স্যুইচ সার্কিট ব্যাখ্যা করা হয়েছে পরবর্তী: আপনি ঘরে তৈরি করতে পারেন 4 সাধারণ সিরেন সার্কিট