পোস্টটি একটি 3 টি ধাপের রিলে অ্যাক্টিভেশন জড়িত যা ক্রমাগত পছন্দসই প্রক্রিয়াগুলি কার্যকর করতে ব্যবহৃত হয় জড়িত একটি নির্দিষ্ট সেট ক্রিয়াকলাপ বাস্তবায়নের জন্য ডিজাইন করা একটি সাধারণ ক্রমিক ক্রমিক টাইমার ব্যাখ্যা করে। ধারণাটি অনুরোধ করেছিলেন জনাব আলী।
প্রযুক্তিগত বিবরণ
আমি আপনার সাইটটি মাঝে মাঝে দেখি এবং এই সময়ের জন্য আমি একটি 3 স্টেজ টাইমার খুঁজছি। আমি আপনার সাইটে এবং অন্যান্য বেশ কয়েকজন মাত্র 2 স্টেজ টাইমার পেয়েছি।
আমি আন্তরিকভাবে আশাবাদী যে আপনি যদি কোনও স্কিম্যাটিক একসাথে রেখে আমার কাছে মেইল করতে পারেন তবে আপনাকে জিজ্ঞাসা করে আমি কোনও অসুবিধায় ফেলছি না। যদি কোনও ব্যয় জড়িত থাকে তবে দয়া করে আমাকে সামনে জানান। প্রয়োজনীয়তা নিম্নরূপ:
পর্যায় 1 হ'ল একটি ক্যামশ্যাফ্ট যা একটি সুইচের প্রেসে উইন্ডস্ক্রিন ওয়াইপার মোটরটি পয়েন্ট এ থেকে পয়েন্ট বিতে মিলিসেকেন্ডের ক্ষেত্রে চালিত হয়।
বিন্দু বি পর্যায়ে 1 পর্যায়ে স্যুইচ অফ করতে হবে এবং পর্যায়টি সক্রিয় করতে হবে 2. প্রায় 100 থেকে 200 (সর্বোচ্চ) মিলিসেকেন্ডের পরে দ্বিতীয় পর্যায়ে স্যুইচ অফ করা উচিত এবং 1 মঞ্চটি পুনরায় সক্রিয় করা উচিত এবং এটিকে আবার বিশ্রামে ফিরে চালানো উচিত stage মঞ্চ 1 এবং 3 এর জন্য সময় উপাদানটি হওয়া উচিত নয় 3 সেকেন্ড অতিক্রম করে (আবার মিলিসেকেন্ডে গণনা করা হয়)।
(মঞ্চ 2 বন্ধন উপাদানের রিলে মাধ্যমে হিটারের একটি সেটকে সক্রিয় করে)) ক্যাপগুলি এবং হাঁড়িগুলির সাথে আমার প্রয়োজন অনুসারে এটি ক্যালিব্রেট করার জন্য আমি প্রায় খেলতে পারি।
এই বিষয়ে আমার কেবল একটি প্রাথমিক জ্ঞান রয়েছে, তাই আপনি যে পরিমাণ বিশদ সরবরাহ করতে পারেন তার জন্য আমি তার প্রশংসা করব।
আপনাকে ধন্যবাদ এবং আপনার প্রতিক্রিয়াটির অপেক্ষায় রইলাম।
কিন্তু।

নকশা
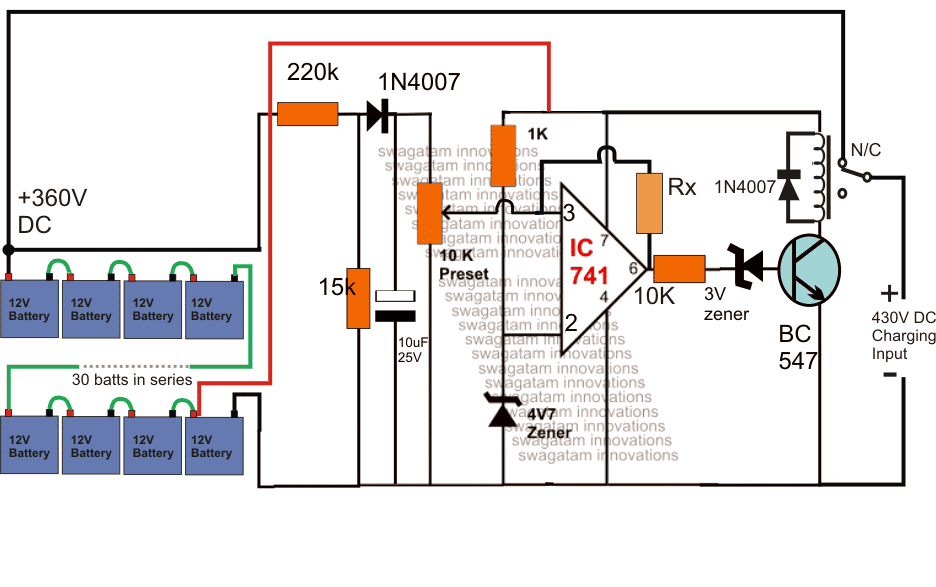
প্রস্তাবিত ক্যামশ্যাফ্ট 3-স্টেজ টাইমার অ্যাকিউউটর সার্কিটের ধারণাটি নিম্নলিখিত পয়েন্টগুলির সাথে বোঝা যাবে:
ধারণাটি সোজা মনে হলেও বাস্তবিকভাবে এটি বাস্তবায়ন করা জটিল বলে মনে হয়।
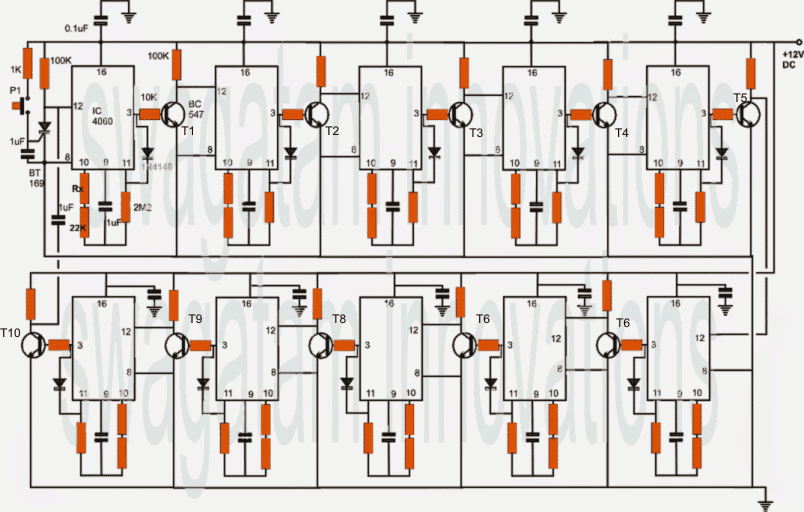
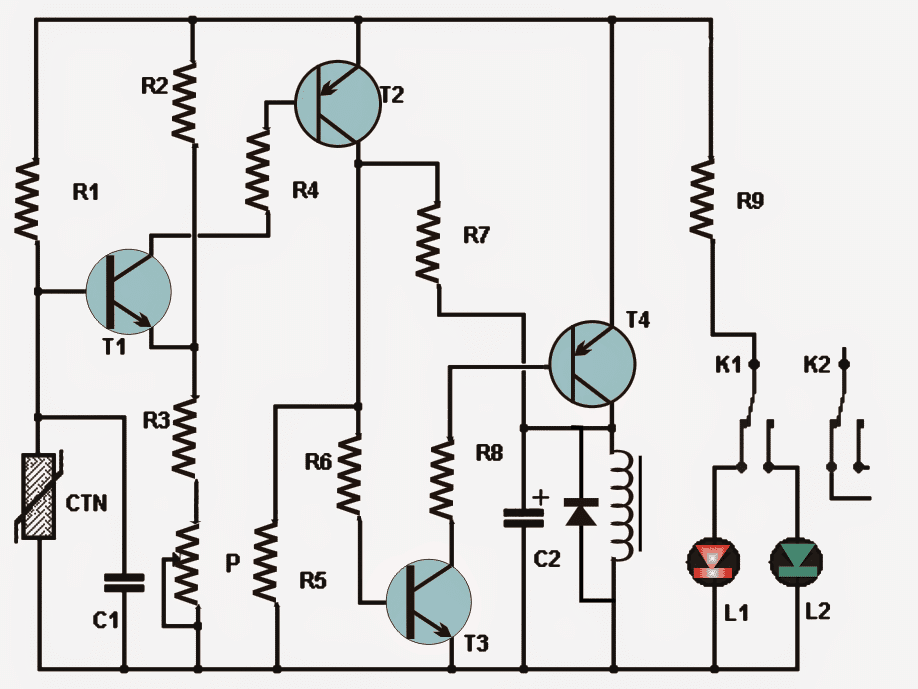
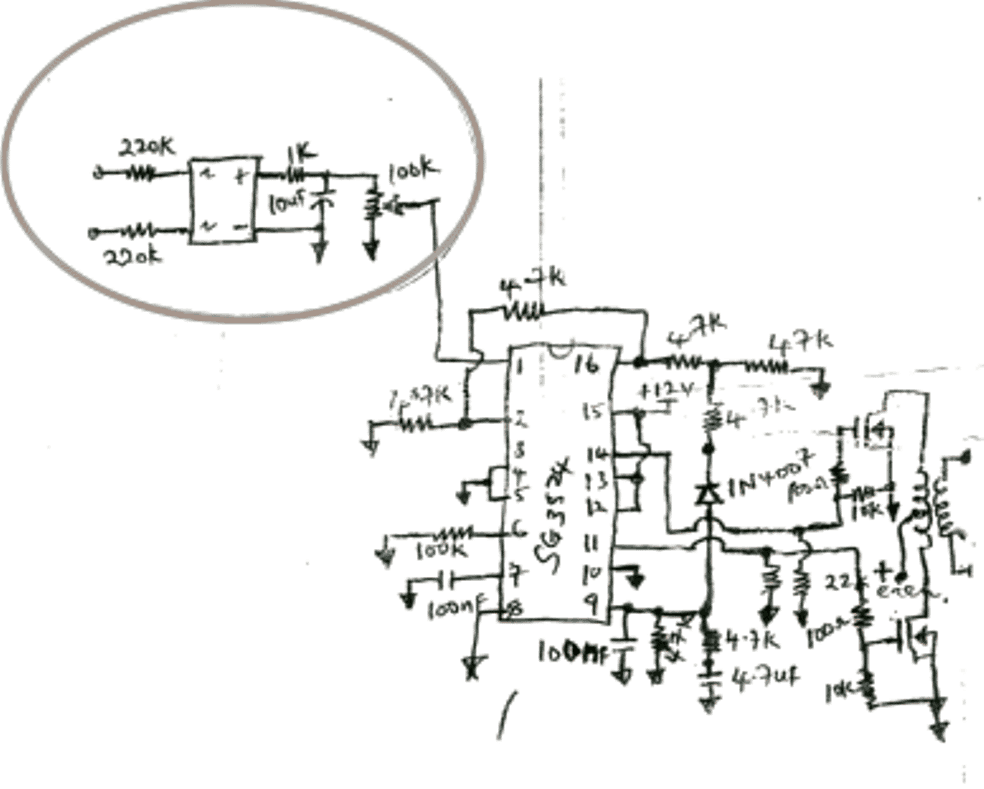
উপরের চিত্রটি উল্লেখ করে, যখন সার্কিটটি চালিত হয়, তখন পিন 15 জুড়ে 0.1uF ক্যাপাসিটার এবং আইসিটির ধনাত্মক আইসিকে একটি স্ট্যান্ডবাই অবস্থানে পুনরায় সেট করে।
যখন দেখানো পুশ বোতামটি ধাক্কা দেওয়া হয়, তখন আইসি 4017 এর পিন 14 একটি ক্লক সিগন্যাল পায় যা এটি একটি লজিককে তার পিন 2-এ স্থানান্তরিত করতে অনুরোধ জানায়, পিন 2 ট্রানজিস্টর ড্রাইভার রিলেটিকে সক্রিয় করে এবং সংযুক্ত মোটর নির্দিষ্ট গন্তব্যে পৌঁছানোর জন্য সক্রিয় হয়।
এটি যখন গন্তব্যে পৌঁছে যায়, তখন খালি # 2 যা এটি পূর্বাভাসের জন্য অবস্থিত, আইসির পিন 14 এ পৌঁছানোর জন্য একটি ডাল ঘড়িটি সক্রিয় করে, যার ফলস্বরূপ এটি পিন 2 থেকে পিন 4 এ লজিক উচ্চ স্থানান্তর করতে বাধ্য করে। এই ক্রিয়াটি তত্ক্ষণাত্ ঘটনাস্থলে মোটরটিকে থামিয়ে দেয়।
একই সাথে, পিন 4 থেকে 'হাই' আবারও একটি ডালকে আইসির পিন 14 হিট করে, তবে আরএক্স এবং সিএক্স উপস্থিতির কারণে এটি প্রায় 100 থেকে 200 মিমি দেরিতে বিলম্বিত হয়। এই সময়ের পরে, পিন 14 টগলড হয় যা আইসিকে লিনিককে পিন 4 থেকে পিন 7 এ ফরোয়ার্ড করতে দেয়।
পিন 7 তত্ক্ষণাত সংযুক্ত রিলেকে কার্যকর করে যা মোটর মেরুটির বিপরীত হয় এবং এটিকে তার আসল অবস্থানে ফিরিয়ে দেয়। আসল অবস্থানের রিডে # 1 এটি অনুমান করার জন্য অবস্থিত, এটি পুশ বোতামের মাধ্যমে পরবর্তী চক্রের সূচনা করার জন্য সম্পর্কিত 0.1uF ক্যাপাসিটরের মাধ্যমে আইসিটিকে মূল স্ট্যান্ডবাই পজিশনে চালিত করে এবং পুনরায় সেট করে।
হিটার স্টেজকে সংহত করার জন্য, আরএক্স, সিএক্সের সংযোগটি একটি অভিন্ন রিলে ড্রাইভার স্টেজ এবং হিটারের সাথে সংযুক্ত পরিচিতিগুলির সাথে কনফিগার করা যেতে পারে।
পূর্ববর্তী: বৈদ্যুতিন সংকেতের মেরু বদল সমাধান করুন 'কোনও লোড অটো-শাটডাউন' সমস্যা নেই পরবর্তী: একটি পেন্টিয়োমিটার (পট) কীভাবে কাজ করে